
搬运入库移动机器人设计
- 文件清单
- 详细介绍
- 安装板.dwg--点击预览
- 安装臂.dwg--点击预览
- 安装块.dwg--点击预览
- 安装立板.dwg--点击预览
- 摆臂.dwg--点击预览
- 搬运车底座.dwg--点击预览
- 搬运入库移动机器人.dwg--点击预览
- 搬运入库移动机器人.stp--点击预览
- 搬运入库移动机器人设计说明书.docx--点击预览
- 搬运入库移动机器人设计-增加PLC电气图纸.dwg--点击预览
- 程序.zip--点击预览
- 电机安装板.dwg--点击预览
- 机械手臂.dwg--点击预览
- 夹爪安装座.dwg--点击预览
- 连接板.dwg--点击预览
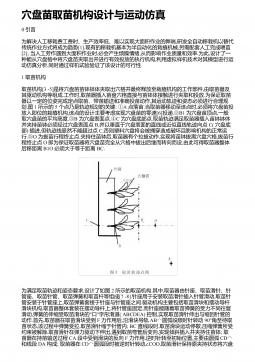
其次,论文详细介绍了机器人的设计与实现过程。搬运臂采用了6061铝合金材料,具有足够的承载能力和稳定性;导航系统能够实现精确的定位和路径规划;传感器系统用于感知周围环境并避免碰撞。
最后,论文对搬运入库移动机器人的应用前景进行了展望。随着物流业的发展和自动化水平的提高,搬运入库移动机器人将在仓储、物流等领域发挥越来越重要的作用,为企业节约人力成本、提高效率提供了新的解决方案。
综上所述,本论文设计了一种搬运入库移动机器人,并对其进行了详细的设计与实现。通过系统的评估与优化,验证了机器人的性能和稳定性,展望了其在物流领域的广阔应用前景,具有一定的理论意义。
标签: #设计
摘要:
展开>>
收起<<
随着工业自动化水平的不断提高,搬运入库移动机器人在物流领域的应用日益广泛。本论文深入探讨了搬运入库移动机器人的设计理念、技术实现和实际应用。首先,我们针对仓储环境的特点,对移动机器人技术进行了全面的研究和评估,以提高物流效率、减少人力成本为目标,设计了一种搬运入库移动机器人,并对其进行了详细的设计与实现。 首先,论文对搬运入库移动机器人的需求进行了分析,包括搬运能力、导航精度、安全性等方面的要求。在此基础上,设计了机器人的整体结构和功能模块,包括搬运臂、导航系统等。


相关推荐
-
核桃分选机设备的研究现状与问题分析
 2024-04-09 163
2024-04-09 163 -
果园挖坑施肥机械的设计与实现
 2024-04-09 131
2024-04-09 131 -
国内外膜上移栽机的发展现状及问题分析
 2024-04-09 237
2024-04-09 237 -
国内外翻转犁研究及发展现状
 2024-04-09 256
2024-04-09 256 -
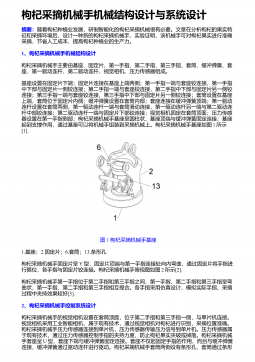
枸杞采摘机械手机械结构设计与系统设计
 2024-04-09 219
2024-04-09 219 -
1K-500自走式果园施肥开沟管理机的设计
 2024-04-09 186
2024-04-09 186 -
基于无线传感器网络的农田环境信息监测平台
 2024-04-12 92
2024-04-12 92 -
花生收获机的行驶机构建模和挖掘铲自适应控制
 2024-04-12 177
2024-04-12 177 -
穴盘苗取苗机构设计与运动仿真
 2024-04-14 225
2024-04-14 225 -
上海地区鲜食玉米全程机械化种植技术方案研究
 2024-04-14 163
2024-04-14 163
作者:闻远设计
分类:非标机械电气自动化
价格:200光币
属性:15 个文件
大小:8.7MB
格式:ZIP
时间:2026-01-14










