
多自由度直角坐标型码垛机器人本体结构设计说明书-机械毕业设计资料
- 文件清单
- 多自由度直角坐标型码垛机器人本体结构设计说明书(1).doc--点击预览
- 三维proe图源文件打包.zip--点击预览
- 图片1.jpg--点击预览
摘要:
展开>>
收起<<
本课题设计的设计内容是完成多自由度直角坐标型码垛机器人本体结构设计,此码垛机器人有四个自由度,用于在流水线对纸箱整齐地码垛在托盘上,能够快速紧凑地码垛。可以通过快速替换机械抓手和重新编程对不同大小的物体进行快速码垛,可以适应不同的码垛对象,应用广泛。 第一步:是对国内外有关码垛机器人领域内的研究背景和发展状况进行了解,并了解其研究目的及意义。第二步:是对码垛机器人的总体方案的选择:通过进行了详细的对比与选择,找到最合适的设计方案,最后方案采用龙门式机构,主要采用是滚珠丝杆螺母副传动,驱动装置采用步进电机,可以通过数控编程改变码垛的路线。第三步:是通过对履带机器人的使用情况与需求,对机构的选型与计算,主要机构有机械抓手、滚动丝杆螺母副、直线滚动导轨副、步进电机、滚动轴承等。第四步:是通过Pro/E画出该码垛机的总体三维结构图,通过CAD画出码垛机总装配图和其零件图,最后通过Pro/E画出该码垛机运动仿真。


相关推荐
-
核桃分选机设备的研究现状与问题分析
 2024-04-09 163
2024-04-09 163 -
果园挖坑施肥机械的设计与实现
 2024-04-09 131
2024-04-09 131 -
国内外膜上移栽机的发展现状及问题分析
 2024-04-09 238
2024-04-09 238 -
国内外翻转犁研究及发展现状
 2024-04-09 256
2024-04-09 256 -
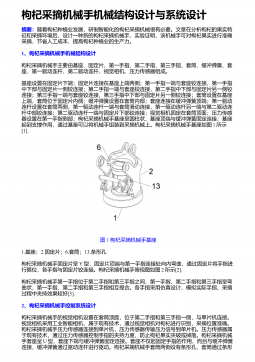
枸杞采摘机械手机械结构设计与系统设计
 2024-04-09 219
2024-04-09 219 -
1K-500自走式果园施肥开沟管理机的设计
 2024-04-09 186
2024-04-09 186 -
基于无线传感器网络的农田环境信息监测平台
 2024-04-12 92
2024-04-12 92 -
花生收获机的行驶机构建模和挖掘铲自适应控制
 2024-04-12 177
2024-04-12 177 -
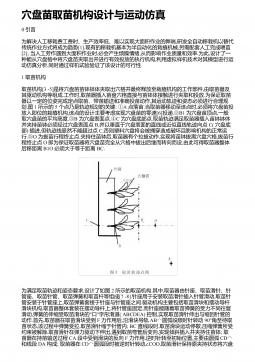
穴盘苗取苗机构设计与运动仿真
 2024-04-14 225
2024-04-14 225 -
上海地区鲜食玉米全程机械化种植技术方案研究
 2024-04-14 163
2024-04-14 163
作者:闻远设计
分类:非标机械电气自动化
价格:80光币
属性:3 个文件
大小:73.44MB
格式:ZIP
时间:2024-09-05










