
下肢康复机器人设计-原创论文-机械毕业设计资料

I
摘 要
随着科学和医学技术的不断发展以及中国经济的飞速发展,瘫痪和行走不
便的人们对下肢辅助装置的需求不断增长,康复机器人技术则是近年来迅速发
展的一门新兴机器人技术,是机器人技术在医学领域的新应用,目前康复机器
人已成为国际社会研究的热点之一。
本课题基于姿态控制的步态康复训练,设计可穿戴式下肢康复机器人,本
文的基础是确定可穿戴式下肢康复机器人的设计要求。在设计过程中,充分考
虑了稳定性以及患者的便捷性,使下肢不便的人可以成功地完成锻炼,并达到
康复及辅助的效果。本课题可以综合运用专业知识解决复杂工程问题的能力,
为今后的就业、深造等奠定坚实的基础,增强其核心竞争力。
首先介绍了国内外下肢康复机器人的发展现状以及发展趋势,分析了它们
的优缺点,然后确定本文的主要研究方向,结合人体解剖学特征和人体参数,
完成下肢康复机器人的结构设计。其次,采用 DH 法建立下肢辅助机器人的运动
模型,简化了人体的自由度,通过简化机器人的结构,从而建立了单腿的运动
模型。它的最终位置和关节变量;在动力学中,使用拉格朗日函数平衡法,这
种方案只需要计算速度而不求内力,这是一种直接而简单的方法。
关键词:下肢康复;机器人;D-H 法;Solidworks;结构设计
I
I
Design of Lower Limb Rehabilitation Robot
Abstract
With the continuous development of science and medical technology, as well as
the rapid development of China's economy, the demand for lower limb assistive
devices for people who are paralyzed and unable to walk continues to grow.
Rehabilitation robot technology is a rapidly developing emerging robot technology in
recent years, and it is a new application of robot technology in the medical field.
Currently, rehabilitation robots have become one of the hotspots of international
research.
This project is based on posture control for gait rehabilitation training, and
designs a wearable lower limb rehabilitation robot. The basis of this article is to
determine the design requirements of a wearable lower limb rehabilitation robot. In
the design process, full consideration was given to stability and patient convenience,
enabling people with lower limb disabilities to successfully complete exercises and
achieve rehabilitation and assistance effects. This project can comprehensively apply
professional knowledge to solve complex engineering problems, laying a solid
foundation for future employment, further education, and enhancing its core
competitiveness.
Firstly, the development status and trends of lower limb rehabilitation robots at
home and abroad were introduced, and their advantages and disadvantages were
analyzed. Then, the main research direction of this article was determined, and the
structural design of lower limb rehabilitation robots was completed based on human
anatomical features and body parameters. Secondly, the DH method was used to
establish the motion model of the lower limb assist robot, simplifying the human
body's degrees of freedom. By simplifying the robot's structure, a single leg motion
model was established. Its final position and joint variables; In dynamics, the
Lagrangian function equilibrium method is used, which only requires calculating the
velocity without calculating the internal force. This is a direct and simple method.
Key words:Lower limb rehabilitation; Robots; D-H method; Solidworks; Structural design
I
I
I
目 录
摘 要.............................................................................................................................II
1 绪 论...........................................................................................................................1
1.1 研究背景及意义...............................................................................................1
1.2 国内外发展现状...............................................................................................1
1.1.1 国外研究现状.........................................................................................1
1.1.2 国内研究现状.........................................................................................3
1.1.3 研究现状总结和分析.............................................................................4
1.3 本文研究内容...................................................................................................4
2 下肢康复理论分析.....................................................................................................5
2.1 人体下肢结构分析...........................................................................................5
2.2 设计要求...........................................................................................................5
2.2.1 设计原则.................................................................................................5
2.2.2 技术目标.................................................................................................6
2.3 设计方案确定...................................................................................................6
2.3.1 驱动方式选择.........................................................................................6
2.3.2 传动系统方案.........................................................................................7
2.3.3 材料选择方案.........................................................................................7
2.3.4 极限位置方案................................................................................................8
2.4 整体结构设计...................................................................................................8
3 运动学与动力学分析.................................................................................................9
3.1 运动学与动力学基本理论...............................................................................9
3.1.1 运动学基本理论.....................................................................................9
3.1.2 动力学基本理论...................................................................................10
3.3 下肢康复机器人运动学分析.........................................................................11
3.3.1 正运动学分析.......................................................................................11
3.3.2 逆运动学分析.......................................................................................13
3.4 动力学分析.....................................................................................................14
3.4.1 腿部模型参数.......................................................................................14
3.4.2 动力学数学建模...................................................................................14
4 关节传动及供气系统设计.......................................................................................17

摘要:
展开>>
收起<<
I摘要随着科学和医学技术的不断发展以及中国经济的飞速发展,瘫痪和行走不便的人们对下肢辅助装置的需求不断增长,康复机器人技术则是近年来迅速发展的一门新兴机器人技术,是机器人技术在医学领域的新应用,目前康复机器人已成为国际社会研究的热点之一。本课题基于姿态控制的步态康复训练,设计可穿戴式下肢康复机器人,本文的基础是确定可穿戴式下肢康复机器人的设计要求。在设计过程中,充分考虑了稳定性以及患者的便捷性,使下肢不便的人可以成功地完成锻炼,并达到康复及辅助的效果。本课题可以综合运用专业知识解决复杂工程问题的能力,为今后的就业、深造等奠定坚实的基础,增强其核心竞争力。首先介绍了国内外下肢康复机器人的发展现状...
相关推荐
-
核桃分选机设备的研究现状与问题分析
 2024-04-09 163
2024-04-09 163 -
果园挖坑施肥机械的设计与实现
 2024-04-09 131
2024-04-09 131 -
国内外膜上移栽机的发展现状及问题分析
 2024-04-09 238
2024-04-09 238 -
国内外翻转犁研究及发展现状
 2024-04-09 256
2024-04-09 256 -
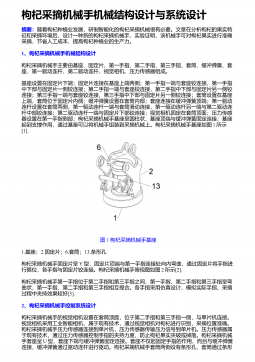
枸杞采摘机械手机械结构设计与系统设计
 2024-04-09 219
2024-04-09 219 -
1K-500自走式果园施肥开沟管理机的设计
 2024-04-09 186
2024-04-09 186 -
基于无线传感器网络的农田环境信息监测平台
 2024-04-12 92
2024-04-12 92 -
花生收获机的行驶机构建模和挖掘铲自适应控制
 2024-04-12 177
2024-04-12 177 -
穴盘苗取苗机构设计与运动仿真
 2024-04-14 225
2024-04-14 225 -
上海地区鲜食玉米全程机械化种植技术方案研究
 2024-04-14 163
2024-04-14 163
作者:闻远设计
分类:非标机械电气自动化
价格:50光币
属性:44 页
大小:2.48MB
格式:DOCX
时间:2024-08-27










