
高空作业机器人的设计-机械毕业设计资料-原创论文


I
高空作业机器人的设计
摘 要
机器人技术是集计算机、控制论、机械、信息和传感技术、人工智能、仿生学
等学科于一体的高科技技术。高空作业机器人是极限工作机器人的一个分支。它
可以取代人类在核工业、石化企业、建筑业、消防等危险条件下进行工作。
本文研究的高空机器人是一种输电巡线的机器人,它可以检测钢丝线的损
坏状况,具有很高的推广价值,本文对高空机器人的结构设计和运动学性能进
行了研究,研究的主要内容如下:
进行高空作业机器人的总体结构设计和局部结构分析,完成高空作业机器
人的设计和开发。在此基础上对运动方式进行研究,通过控制电机的转速,控制
相应的运动速度,并对零部件进行结构设计、计算校核,针对高空作业机器人的
机械性能进行了分析,最后用 CAD 绘制输电巡线机器人的总装图和代表性零件
图。
关键词:输电巡线; 高空作业;机器人;结构设计;强度分析
II
Design of high-altitude operation robots
Abstract
Robot technology is a high-tech technology that integrates disciplines such as
computer science, control theory, mechanics, information and sensing technology,
artificial intelligence, and bionics. High altitude work robots are a branch of extreme
work robots. It can replace human work in hazardous conditions such as nuclear
industry, petrochemical enterprises, construction industry, and firefighting.
The high-altitude robot studied in this article is a type of transmission line
inspection robot that can detect damage to steel wires and has high promotion value.
This article studies the structural design and kinematic performance of the high-
altitude robot, and the main research content is as follows:
Conduct overall structural design and local structural analysis of high-altitude
work robots, and complete the design and development of high-altitude work robots.
On this basis, research was conducted on the motion mode. By controlling the speed
of the motor, the corresponding motion speed was controlled, and the structural
design and calculation verification of the components were carried out. The
mechanical performance of the high-altitude operation robot was analyzed. Finally,
the final assembly diagram and representative part diagram of the transmission line
inspection robot were drawn using CAD.
Keywords:Transmission line inspection; Working at heights; Robots;
III
Structural design; Strength analysis

摘要:
展开>>
收起<<
I高空作业机器人的设计摘要机器人技术是集计算机、控制论、机械、信息和传感技术、人工智能、仿生学等学科于一体的高科技技术。高空作业机器人是极限工作机器人的一个分支。它可以取代人类在核工业、石化企业、建筑业、消防等危险条件下进行工作。本文研究的高空机器人是一种输电巡线的机器人,它可以检测钢丝线的损坏状况,具有很高的推广价值,本文对高空机器人的结构设计和运动学性能进行了研究,研究的主要内容如下:进行高空作业机器人的总体结构设计和局部结构分析,完成高空作业机器人的设计和开发。在此基础上对运动方式进行研究,通过控制电机的转速,控制相应的运动速度,并对零部件进行结构设计、计算校核,针对高空作业机器人的机械...
相关推荐
-
核桃分选机设备的研究现状与问题分析
 2024-04-09 163
2024-04-09 163 -
果园挖坑施肥机械的设计与实现
 2024-04-09 131
2024-04-09 131 -
国内外膜上移栽机的发展现状及问题分析
 2024-04-09 238
2024-04-09 238 -
国内外翻转犁研究及发展现状
 2024-04-09 256
2024-04-09 256 -
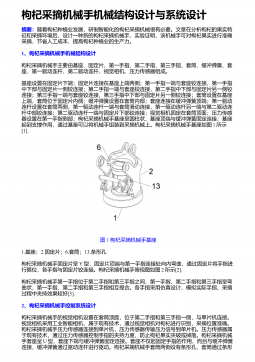
枸杞采摘机械手机械结构设计与系统设计
 2024-04-09 219
2024-04-09 219 -
1K-500自走式果园施肥开沟管理机的设计
 2024-04-09 186
2024-04-09 186 -
基于无线传感器网络的农田环境信息监测平台
 2024-04-12 92
2024-04-12 92 -
花生收获机的行驶机构建模和挖掘铲自适应控制
 2024-04-12 177
2024-04-12 177 -
穴盘苗取苗机构设计与运动仿真
 2024-04-14 225
2024-04-14 225 -
上海地区鲜食玉米全程机械化种植技术方案研究
 2024-04-14 163
2024-04-14 163
作者:闻远设计
分类:非标机械电气自动化
价格:50光币
属性:39 页
大小:8.43MB
格式:DOC
时间:2024-08-27










