
幕墙清洗机器人本体结构及吸附系统设计-机械毕业设计资料-原创论文

摘 要
本文主要探讨了幕墙清洗机器人的结构设计。首先介绍了幕墙清洗机器人的
市场需求和发展现状,阐述了本设计的必要性和重要性。接着详细介绍了机器人
主体的结构设计和各个组件的选型,包括机身材料、驱动系统、控制系统、清洗系
统等。
本文重点研究了幕墙清洗机器人的本体结构及吸附系统的设计。详细阐述了
本设计的创新点与实施方案。本文主要从机器人机身的结构设计、吸附系统的原理
及实现方法等方面展开讨论,并提出了改进方案。最后,通过实验验证了本设计
的可行性和实用性,并对未来的改进方向进行了展望。
关键词 幕墙清洗机器人;本体结构;吸附系统;设计
Abstract
Since China's reform and opening up, the level of science and technology has been
continuously improved, followed by the rapid improvement of artificial intelligence
technology. Not only have many artificial intelligence technologies begun to integrate into
people's lives, but there is a technology called intelligent mechanical technology in
artificial intelligence technology. The development of this technology enables artificial
robots to carry out certain industrial production in the future. The widely used and widely
applicable robot in intelligent machinery is the wall cleaning machine, which has played a
good role in both industrial and engineering projects. So scientists have a relatively high
level of attention to wall cleaning machines, so more research is needed on this robot.
During the writing process of this paper, a simple understanding of wall cleaning machines
was first conducted, and then a large amount of relevant materials and data information
were reviewed for quantitative analysis and comparison. After analysis, it was found that
there are many types of wall cleaning machines, with different appearances, internal
structures, and working methods. Therefore, this paper specifically selected the crawler
type adsorption type for careful research, Then detailed calculations were conducted on the
internal design.
Keywords wall cleaning machine; Track adsorption type; Design; drive
2
目 录
摘 要.................................................................II
Abstract................................................................3
第 1 章 绪论............................................................5
1.1 课题研究的目的和意义...............................................5
1.2 国内外研究现状....................................................6
1.2.1 国外研究现状.....................................................6
1.2.2 国内研究现状.....................................................7
1.3 发展趋势..........................................................8
第 2 章 方案比选确定...................................................10
2.1 车轮式磁吸附幕墙清洗机.............................................10
2.2 履带式磁吸附幕墙清洗机.............................................11
2.3 履带式真空吸附幕墙清洗机...........................................11
第 3 章 功能部件设计...................................................13
3.1 驱动电机设计.......................................................13
3.2 配套电池选型.......................................................13
3.3 真空吸盘选型计算...................................................13
第 4 章 控制系统设计...................................................14
4.1 总控制电路.........................................................14
4.2 驱动电机的控制.....................................................17
4.3 毛刷电机控制.......................................................17
4.4 真空吸盘控制.......................................................18
设计总结...............................................................19
参 考 文 献............................................................20
3

摘要:
展开>>
收起<<
摘要本文主要探讨了幕墙清洗机器人的结构设计。首先介绍了幕墙清洗机器人的市场需求和发展现状,阐述了本设计的必要性和重要性。接着详细介绍了机器人主体的结构设计和各个组件的选型,包括机身材料、驱动系统、控制系统、清洗系统等。本文重点研究了幕墙清洗机器人的本体结构及吸附系统的设计。详细阐述了本设计的创新点与实施方案。本文主要从机器人机身的结构设计、吸附系统的原理及实现方法等方面展开讨论,并提出了改进方案。最后,通过实验验证了本设计的可行性和实用性,并对未来的改进方向进行了展望。关键词幕墙清洗机器人;本体结构;吸附系统;设计AbstractSinceChina'sreformandopenin...
相关推荐
-
核桃分选机设备的研究现状与问题分析
 2024-04-09 163
2024-04-09 163 -
果园挖坑施肥机械的设计与实现
 2024-04-09 131
2024-04-09 131 -
国内外膜上移栽机的发展现状及问题分析
 2024-04-09 238
2024-04-09 238 -
国内外翻转犁研究及发展现状
 2024-04-09 256
2024-04-09 256 -
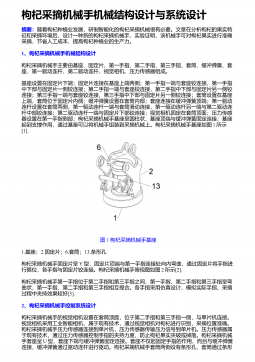
枸杞采摘机械手机械结构设计与系统设计
 2024-04-09 219
2024-04-09 219 -
1K-500自走式果园施肥开沟管理机的设计
 2024-04-09 186
2024-04-09 186 -
基于无线传感器网络的农田环境信息监测平台
 2024-04-12 92
2024-04-12 92 -
花生收获机的行驶机构建模和挖掘铲自适应控制
 2024-04-12 177
2024-04-12 177 -
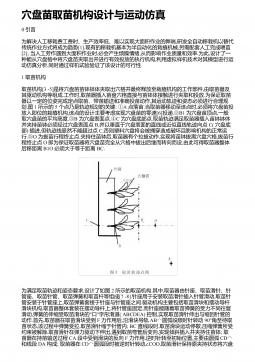
穴盘苗取苗机构设计与运动仿真
 2024-04-14 225
2024-04-14 225 -
上海地区鲜食玉米全程机械化种植技术方案研究
 2024-04-14 163
2024-04-14 163
作者:闻远设计
分类:非标机械电气自动化
价格:50光币
属性:24 页
大小:1.87MB
格式:DOC
时间:2024-08-27










