
基于单片机的灭火机器人设计-机械自动化专业-机械毕业设计资料

I
基于单片机的灭火机器人设计
摘要
为有效地防止工作人员受到伤害,需要利用智能化消防机器人在危险的环境中执
行相关工作。所以,对智能灭火机器人导航与控制系统的研发有着极大的重要性。
此系统使用了MC68HC11单片机作为主要的控制元件,构建了一个能够运用红
外线光电探测器获取道路数据,同时用红外火焰探测仪监测火灾位置的智能寻找火
源的灭火机器人。这个系统包括了微型处理器控制单元、追踪传感器组件、驱动力
马达部分、火源感知设备、鼓风机装置、电力供应部件等等。实践证明,这款灭火
机器人能在特定的场地内独立找到起火点,自动辨识出路途方向,自行移动到火灾
地点实施扑救,最后成功完成了灭火使命。
关键词:单片机;灭火机器人;引导控制;传感器;灭火
1
Design of fire extinguishing robot based
on single-chip microcomputer
Abstract
In order to effectively prevent workers from being injured, it is necessary to use
i n t e l l i g e n t f i r e f i g h t i n g r o b o t s t o p e r f o r m r e l e v a n t w o r k i n d a n g e r o u s e n v i r o n m e n t s .
Therefore, it is of great importance to the research and development of intelligent fire
e x t i n g u i s h i n g r o b o t n a v i g a t i o n a n d c o n t r o l s y s t e m . T h e s y s t e m u s e s t h e 6 8 H C 1 1
microprocessor as the main control element to build a fire extinguishing robot that can use
infrared photodetectors to obtain road data and monitor the location of fires with infrared
flame detectors. The system consists of a microprocessor control unit, a tracking sensor
component, a drive motor part, a fire source sensing device, a blower unit, a power supply
component, and so on. Practice has proved that this fire extinguishing robot can
independently find the fire point in a specific site, automatically identify the direction of
the road, move to the fire site to extinguish the fire by itself, and finally successfully
complete the fire extinguishing mission.
Key words: Microcontroller , Car ,Control system, Sensors
1 绪论............................................................................................................................................................ 1
1.1 课题来源与意义................................................................................................................................. 1
1.2 国内外研究现状................................................................................................................................. 2
1.2.1 国内研究现状..............................................................................................................................2
1.2.2 国外研究现状..............................................................................................................................4
1.3 课题研究方法.....................................................................................................................................6
2
2灭火机器人总体结构设计.........................................................................................................................7
2.1 灭火机器人的功能要求.....................................................................................................................7
2.2 总体设计方案.....................................................................................................................................7
2.2.1 灭火机器人基本结构.................................................................................................................. 8
2.2.2 水泵灭火装置结构设计.................................................................................................................. 9
2.2.3 灭火机器人外形设计....................................................................................................................12
2.2.2 电源模块的选定........................................................................................................................13
2.2.3 灭火机器人单片机控制模块....................................................................................................13
2.2.4 驱动电机模块的选定................................................................................................................14
2.2.5 火源传感器模块的选定............................................................................................................ 14
2.2.6 寻迹传感器模块的选定............................................................................................................ 15
2.3 基于单片机的灭火机器人设计方案................................................................................................15
3 基于单片机的灭火机器人机械系统设计...............................................................................................16
3.1 喷水枪结构设计...............................................................................................................................16
3.2 喷水支架结构设计........................................................................................................................... 16
3.3 齿轮箱设计.......................................................................................................................................17
3.3.1 齿轮箱轴的设计及强度校核....................................................................................................18
3.3.2 齿轮箱轴承的设计及强度校核................................................................................................21
3.3.3 齿轮箱键的设计及强度校核....................................................................................................23
4 基于单片机的灭火机器人控制系统设计...............................................................................................24
4.1灭火方案的确定................................................................................................................................ 24
4.2 火源定位...........................................................................................................................................26
4.3 传感器的布置...................................................................................................................................26
4.4 基于单片机的灭火机器人系统总体流程........................................................................................27
4.5 程序流程图.......................................................................................................................................27
结 论......................................................................................................................................................... 32
致 谢......................................................................................................................................................... 33
参考文献..................................................................................................................................................... 34
1 绪论
1.1 课题来源与意义
随着社会经济迅猛发展,每年各种各样的火灾层出不穷,火灾、化学危险品泄
露、爆炸导致的坍塌事故等等一系列消防事故导致许多消防战士牺牲,严重威胁人

摘要:
展开>>
收起<<
I基于单片机的灭火机器人设计摘要为有效地防止工作人员受到伤害,需要利用智能化消防机器人在危险的环境中执行相关工作。所以,对智能灭火机器人导航与控制系统的研发有着极大的重要性。此系统使用了MC68HC11单片机作为主要的控制元件,构建了一个能够运用红外线光电探测器获取道路数据,同时用红外火焰探测仪监测火灾位置的智能寻找火源的灭火机器人。这个系统包括了微型处理器控制单元、追踪传感器组件、驱动力马达部分、火源感知设备、鼓风机装置、电力供应部件等等。实践证明,这款灭火机器人能在特定的场地内独立找到起火点,自动辨识出路途方向,自行移动到火灾地点实施扑救,最后成功完成了灭火使命。关键词:单片机;灭火机器人...
相关推荐
-
核桃分选机设备的研究现状与问题分析
 2024-04-09 163
2024-04-09 163 -
果园挖坑施肥机械的设计与实现
 2024-04-09 131
2024-04-09 131 -
国内外膜上移栽机的发展现状及问题分析
 2024-04-09 238
2024-04-09 238 -
国内外翻转犁研究及发展现状
 2024-04-09 256
2024-04-09 256 -
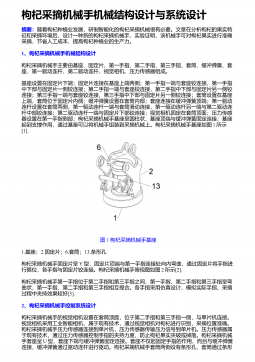
枸杞采摘机械手机械结构设计与系统设计
 2024-04-09 219
2024-04-09 219 -
1K-500自走式果园施肥开沟管理机的设计
 2024-04-09 186
2024-04-09 186 -
基于无线传感器网络的农田环境信息监测平台
 2024-04-12 92
2024-04-12 92 -
花生收获机的行驶机构建模和挖掘铲自适应控制
 2024-04-12 177
2024-04-12 177 -
穴盘苗取苗机构设计与运动仿真
 2024-04-14 225
2024-04-14 225 -
上海地区鲜食玉米全程机械化种植技术方案研究
 2024-04-14 163
2024-04-14 163
作者:闻远设计
分类:非标机械电气自动化
价格:70光币
属性:36 页
大小:2.74MB
格式:DOCX
时间:2024-08-21










