
M40型工业机器人小车传动装置设计-机械毕业设计资料


I
M40 型工业机器人小车传动装置设计
摘 要
在当今的大型制造业中,为了提高生产效率,保证产品质量, 工业机器人小
车的技术水平和应用水平在一定程度上反映了一个国家的工业自动化水平。目
前小车传动装置负责重复性和劳动密集型任务,如焊接、喷涂、搬运和堆放。
通过了解工业机器人小车的应用情况,对机器人的设计提出了具体的要求,
根据三维线性运动原则制定了机器人小车各部分的设计原则,拟定系统方案:
主体的详细机械结构,即 X、Y、Z方向的具体机械结构,包括传动结构、支
撑结构,驱动结构及相关必要附件,实现机器人小车的运动方式。对现有的机
械结构提出了新的改善,将目前的新技术应用到本课题中,使机器小车更适合
现在的工业作业环境。
本文设计了 M40 型工业机器人小车的机械部分,主要包括龙门架、传动系统
等方面。通过对小车的龙门式移动机构的设计,选用电动机、传动装置的设计,
并利用三维软件 Solidworks 完成三维模型建立,然后对关键零部件的校核,在
参数优化的基础上对其绘制二维 AutoCAD 图纸,本文对于工业机器人小车的
设计具有一定的参考价值。
关键词:M40 型;工业机器人;小车;传动装置;SolidWorks
II
Design of Transmission Device for M40 Industrial Robot Car
Abstract
In today's large-scale manufacturing industry, in order to improve production
efficiency and ensure product quality, the technical level and application level of
industrial robot cars to a certain extent reflect a country's industrial automation level.
At present, the small car transmission device is responsible for repetitive and labor-
intensive tasks such as welding, spraying, handling, and stacking.
By understanding the application of industrial robot cars, specific requirements for
the design of robots were proposed. Based on the principle of three-dimensional
linear motion, design principles for each part of the robot car were formulated, and a
system plan was formulated: the detailed mechanical structure of the main body,
namely the specific mechanical structure in the X, Y, and Z directions, including
transmission structure, support structure, drive structure, and necessary accessories,
to achieve the motion mode of the robot car. New improvements have been proposed
to the existing mechanical structure, and the current new technologies have been
applied to this project to make the machine trolley more suitable for the current
industrial working environment.
This article designs the mechanical part of the M40 industrial robot car, mainly
including the gantry, transmission system, and other aspects. By designing the gantry
movement mechanism of the small car, selecting the design of the electric motor and
transmission device, and using the 3D software Solidworks to establish the 3D
model, and then verifying the key components, drawing 2D AutoCAD drawings
based on parameter optimization, this article has certain reference value for the
design of industrial robot small cars.
Keywords: M40 type; Industrial robots; Small car; Transmission device; SolidWorks
1
目 录
第一章 引言.................................................................................................................1
1.1 研究背景..........................................................................................................1
1.2 国内外研究现状.............................................................................................2
1.2.1 国外研究现状........................................................................................2
1.2.2 国内研究现状........................................................................................4
1.3 研究方法与研究内容......................................................................................7
1.3.1 研究方法................................................................................................7
1.3.2 研究内容................................................................................................8
第二章 结构设计要求及总体方案设计.....................................................................9
2.1 设计要求..........................................................................................................9
2.1.1 结构设计参数要求................................................................................9
2.1.2 设计研究内容及框架............................................................................9
2.2 整体布置结构形式..........................................................................................9
2.2.1 移动桥式................................................................................................9
2.2.2 L 形桥式..............................................................................................10
2.2.3 龙门式..................................................................................................11
2.2.4 固定桥式..............................................................................................12
2.2.5 水平悬臂移动式..................................................................................12
2.3 总体方案设计................................................................................................13
2.4 本章小结........................................................................................................13
第三章 传动系统选型计算.......................................................................................14
3.1 电机的计算选型............................................................................................14
3.1.1 类型确定..............................................................................................14
3.1.2 负载转动惯量估算..............................................................................14
3.1.3 计算折算到电动机轴上的负载力矩..................................................16
3.1.4 计算坐标轴折算到电动机轴上的各种所需的力矩..........................17
3.1.5 选择驱动电动机的型号......................................................................18
3.2 驱动齿轮的设计............................................................................................19

摘要:
展开>>
收起<<
IM40型工业机器人小车传动装置设计摘要在当今的大型制造业中,为了提高生产效率,保证产品质量,工业机器人小车的技术水平和应用水平在一定程度上反映了一个国家的工业自动化水平。目前小车传动装置负责重复性和劳动密集型任务,如焊接、喷涂、搬运和堆放。通过了解工业机器人小车的应用情况,对机器人的设计提出了具体的要求,根据三维线性运动原则制定了机器人小车各部分的设计原则,拟定系统方案:主体的详细机械结构,即X、Y、Z方向的具体机械结构,包括传动结构、支撑结构,驱动结构及相关必要附件,实现机器人小车的运动方式。对现有的机械结构提出了新的改善,将目前的新技术应用到本课题中,使机器小车更适合现在的工业作业环境。...
相关推荐
-
核桃分选机设备的研究现状与问题分析
 2024-04-09 163
2024-04-09 163 -
果园挖坑施肥机械的设计与实现
 2024-04-09 131
2024-04-09 131 -
国内外膜上移栽机的发展现状及问题分析
 2024-04-09 238
2024-04-09 238 -
国内外翻转犁研究及发展现状
 2024-04-09 256
2024-04-09 256 -
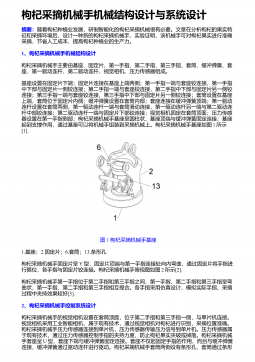
枸杞采摘机械手机械结构设计与系统设计
 2024-04-09 219
2024-04-09 219 -
1K-500自走式果园施肥开沟管理机的设计
 2024-04-09 186
2024-04-09 186 -
基于无线传感器网络的农田环境信息监测平台
 2024-04-12 92
2024-04-12 92 -
花生收获机的行驶机构建模和挖掘铲自适应控制
 2024-04-12 177
2024-04-12 177 -
穴盘苗取苗机构设计与运动仿真
 2024-04-14 225
2024-04-14 225 -
上海地区鲜食玉米全程机械化种植技术方案研究
 2024-04-14 163
2024-04-14 163
作者:闻远设计
分类:非标机械电气自动化
价格:45光币
属性:52 页
大小:5.99MB
格式:DOCX
时间:2024-08-16










