
果实采摘机械手的设计与仿真-机械毕业设计资料


I
果实采摘机械手的设计与仿真
摘要:果实采摘工作具有较强的复杂性和较低的自动化程度,目前国内水果的采
摘工作主要靠手工完成。21 世纪是农用机械化向智能自动化机械过渡的关键时期,
工业智能自动化对现代农业发展规模化、多样化和精确化十分重要。本文针对小
型柑橘进行采摘机械手的设计,实现果实的全程自动化采摘。
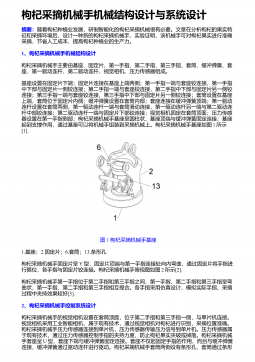
RR本文通过对果实采摘机械手的采摘环境和采摘特点进行分析,提出一种六自
由度小型柑橘采摘串联机械手。通过设计 3 种末端执行器机械结构,使得机械手具
有多用途作用,并将机械手与相关辅助装置相结合,实现整个柑橘果园采摘过程
的自动化。本论文基于 SolidWorks,建立机构的三维模型与仿真分析。根据仿真
与试验的结果得出机械手具有良好的采摘性能。该机构解决了人们采摘高处果实
难、果实采摘工作量大和人工采摘具有一定危险性等缺点,实现了小型柑橘等多
种果实不受物理损伤的自动化采摘。
关键词:工业机器人;果实采摘机器人;机械手;运动学仿真;
II
Design and simulation of fruit picking manipulator
Abstract: Fruit picking work is full of a strong complexity and low degree of
automation. Now, the harvest of fruit is mainly done by hand in China. The 21st century
is the key period for the transition from agricultural mechanization to intelligent
automation machinery, and industrial intelligent automation is very important for
modern agricultural to develop large-scale, diversification and precision. In this paper,
the design of picking manipulator for small citrus fruit is to realize the whole process of
fruit picking.
This paper analyzes the environment of picking and characteristics of the fruit picking
manipulator, and puts forwards to a six-degree-of-freedom small citrus picking series
manipulator. Through the design of three kinds of end executor mechanical structure,
making the manipulator has the utility function, and combines the manipulator and the
related aided device, realizing the automation of the whole process of citrus orchard.
This paper is based on SolidWorks, which establishes the model of three-dimensional
and simulation analysis of the mechanism. According to the results of simulation and
experiment, the mechanical hand, we’re sure that it has good picking performance. The
agency has solved the fruit, fruit picking people picking high workload and artificial
picking has some shortcomings, such as risk, realizing the small citrus and other fruit
automatic picking is not subject to physical damage.
Keywords: Industrial robot; Fruit picking robot; Manipulator; Kinematics simulation
目 录
摘要....................................................................................................................................I
目 录..............................................................................................................................III
第1章 绪论.....................................................................................................................1
1.1 课题研究背景及意义..............................................................................................1
1.2 国外研究成果及现状..............................................................................................1
1.2.1 国外采摘机器人成果及现状...........................................................................1
1.2.2 国外末端执行器研制进展情况.......................................................................3
1.3 国内研究成果及现状..............................................................................................4
1.4 主要研究的内容......................................................................................................4
第2章 柑橘采摘机器人机械手机构设计.....................................................................5
2.1 小型柑橘的生物学特征..........................................................................................5
2.2 采摘机器人选型原则..............................................................................................6
2.3 柑橘采摘机器人机械手的选型..............................................................................7
2.4 本章小结..................................................................................................................8
第3章 柑橘采摘机器人总体结构方案设计.................................................................9
3.1 可移动小车底盘....................................................................................................10
3.2 升降梯....................................................................................................................10
3.3 柑橘采摘机械手臂................................................................................................11
3.4 柑橘采摘执行末端................................................................................................12
3.5 电控系统................................................................................................................12
3.5.1 控制系统.........................................................................................................12
3.5.2 视觉系统.........................................................................................................12
3.6 本章小结................................................................................................................13
第4章 执行末端的设计...............................................................................................14
4.1 柑橘采摘末端执行器设计的总体原则................................................................14
4.2 设计三维软件 SOLIDWORKS 简介.........................................................................14
4.3 连杆机构设计方案................................................................................................14
4.4 半球式设计方案....................................................................................................20
4.5 半齿设计方案........................................................................................................21
4.5.1 齿轮传动的计算载荷.....................................................................................22
4.6 三种方案的优缺点分析........................................................................................24

摘要:
展开>>
收起<<
I果实采摘机械手的设计与仿真摘要:果实采摘工作具有较强的复杂性和较低的自动化程度,目前国内水果的采摘工作主要靠手工完成。21世纪是农用机械化向智能自动化机械过渡的关键时期,工业智能自动化对现代农业发展规模化、多样化和精确化十分重要。本文针对小型柑橘进行采摘机械手的设计,实现果实的全程自动化采摘。RR本文通过对果实采摘机械手的采摘环境和采摘特点进行分析,提出一种六自由度小型柑橘采摘串联机械手。通过设计3种末端执行器机械结构,使得机械手具有多用途作用,并将机械手与相关辅助装置相结合,实现整个柑橘果园采摘过程的自动化。本论文基于SolidWorks,建立机构的三维模型与仿真分析。根据仿真与试验的结果...
相关推荐
-
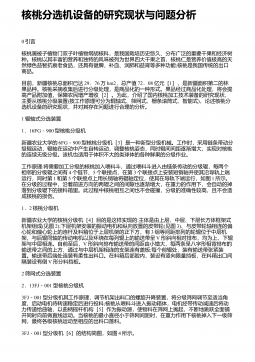
核桃分选机设备的研究现状与问题分析
 2024-04-09 163
2024-04-09 163 -
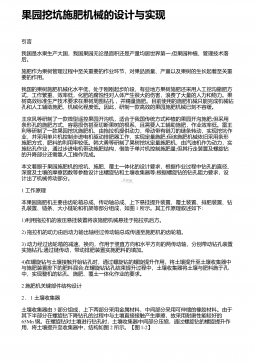
果园挖坑施肥机械的设计与实现
 2024-04-09 131
2024-04-09 131 -
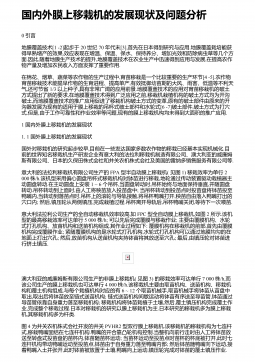
国内外膜上移栽机的发展现状及问题分析
 2024-04-09 238
2024-04-09 238 -
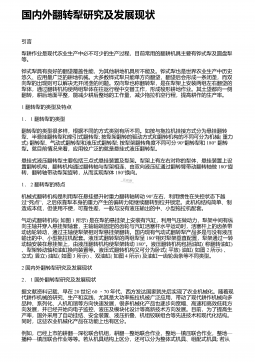
国内外翻转犁研究及发展现状
 2024-04-09 256
2024-04-09 256 -
枸杞采摘机械手机械结构设计与系统设计
 2024-04-09 219
2024-04-09 219 -
1K-500自走式果园施肥开沟管理机的设计
 2024-04-09 186
2024-04-09 186 -
基于无线传感器网络的农田环境信息监测平台
 2024-04-12 92
2024-04-12 92 -
花生收获机的行驶机构建模和挖掘铲自适应控制
 2024-04-12 177
2024-04-12 177 -
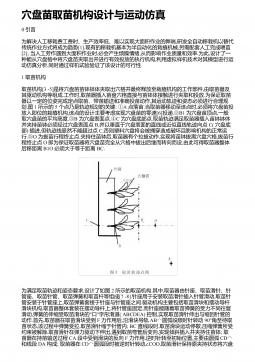
穴盘苗取苗机构设计与运动仿真
 2024-04-14 225
2024-04-14 225 -
上海地区鲜食玉米全程机械化种植技术方案研究
 2024-04-14 163
2024-04-14 163
作者:闻远设计
分类:非标机械电气自动化
价格:100光币
属性:76 页
大小:15.82MB
格式:DOCX
时间:2024-08-16










