
履带机器人驱动计算new


履带机器人驱动力计算
道路参数输入 电机选型(电机参数输入) 行走电机减速器校验(自动计算)
0.11 整车平地行走所需功率 44 W
1.1 电机数量 2 个 整车坡度行走所需功率 231.321 W
地面峰值附着系数 1.1 有效电机数 2 个 整车电机提供有效功率 500 W
轨道坡度 55 % 2.16
轨道坡度 0.5028 弧度 电机功率 250 W 整车平地所需行走扭矩 6.6 Nm
轨道坡度 28.811 度 额定电压 36 VDC 整车坡道所需行走扭矩 34.6981 Nm
障碍高度 165 mm 实际扭矩 0.45714 Nm 整车电机额定输出扭矩 58.5143 Nm
空转电流 1 A 1.69
车体参数输入 9 A 整车平地所需加速扭矩 8.4 Nm
履带数量 2 个 额定扭矩 0.52 Nm 整车坡道所需加速扭矩 36.4981 Nm
有效履带数 2 个 额定电流 9.1 A 整车电机最大输出扭矩 96 Nm
履带轮子直径 120 mm 最大扭矩 1.5 Nm 2.63
履带驱动轮直径 120 mm IP65 越障,附加扭矩 3 Nm
使用温度 度 越障,整车所需扭矩 39.4981 Nm
446 mm 额定转速 4700 rpm 越障,整车电机最大扭矩 153.6 Nm
592 mm 最高转速 5500 rpm 整车路面提供的最大扭矩 66 Nm
车体重量 50 kg 3.89
负载重量 50 kg 电流最大不均匀度 1.1 1.67096
1.3274 单电机最大平均电流 9.9 A 平地原地回转,单履带阻力 420.022 N
单电机额定提供驱动力 487.619 N
1.16094
运行参数输入 减速器选型(减速器参数输入) 整车行走设计输出参数
平地车体额定速度 0.4 m/s 平地(坡道)额定速度 0.46119 m/s
平地车体最大速度 0.5 m/s 总减速比 64 平地(坡道)最大速度 0.53969 m/s
坡道额定速度 0.4 m/s 自制减速比 1
运行加速度 0.3 m/s2 大齿轮 25
坡道加速度 0.3 m/s2 小齿轮 25
大齿轮许用扭矩 Nm 额定时,大齿轮输出扭矩 29.2571 Nm
小齿轮许用扭矩 Nm 额定时,小齿轮输出扭矩 29.2571 Nm
减速器减速比 64 0.00
额定转速 3500 rpm 0.00
最高转速 6000 rpm
额定扭矩 35 Nm 额定时,减速器输出扭矩 29.2571 Nm
使用温度 度 1.20
滚动摩擦系数f
滑动摩擦系数u
行走功率安全系数(需≥1.2)
行走额定扭矩安全系数(需≥1.2)
实际电流(平均)
加速最大扭矩安全系数(需≥1.2)
IP等级
`0~40
履带间距(左右)B
接地长度(前后)L
行走最大扭矩安全系数(需≥1.2)
路面提供扭矩安全系数(需≥1.2)
尺寸系数L/B(1~1.6)
原地回转扭矩安全系数(需≥1.2)
大齿轮安全系数(需≥1.2)
小齿轮安全系数(需≥1.2)
-30~90
减速器安全系数(需≥1.2)

标签: #机器人
摘要:
展开>>
收起<<
履带机器人驱动力计算道路参数输入电机选型(电机参数输入)行走电机减速器校验(自动计算)0.11整车平地行走所需功率44W1.1电机数量2个整车坡度行走所需功率231.321W地面峰值附着系数1.1有效电机数2个整车电机提供有效功率500W轨道坡度55%2.16轨道坡度0.5028弧度电机功率250W整车平地所需行走扭矩6.6Nm轨道坡度28.811度额定电压36VDC整车坡道所需行走扭矩34.6981Nm障碍高度165mm实际扭矩0.45714Nm整车电机额定输出扭矩58.5143Nm空转电流1A1.69车体参数输入9A整车平地所需加速扭矩8.4Nm履带数量2个额定扭矩0.52Nm整车坡道所需...
相关推荐
-
核桃分选机设备的研究现状与问题分析
 2024-04-09 163
2024-04-09 163 -
果园挖坑施肥机械的设计与实现
 2024-04-09 131
2024-04-09 131 -
国内外膜上移栽机的发展现状及问题分析
 2024-04-09 238
2024-04-09 238 -
国内外翻转犁研究及发展现状
 2024-04-09 256
2024-04-09 256 -
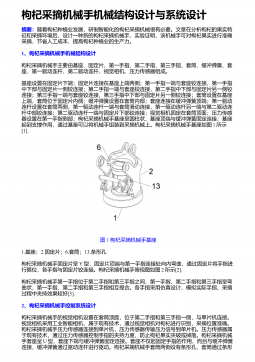
枸杞采摘机械手机械结构设计与系统设计
 2024-04-09 219
2024-04-09 219 -
1K-500自走式果园施肥开沟管理机的设计
 2024-04-09 186
2024-04-09 186 -
基于无线传感器网络的农田环境信息监测平台
 2024-04-12 92
2024-04-12 92 -
花生收获机的行驶机构建模和挖掘铲自适应控制
 2024-04-12 177
2024-04-12 177 -
穴盘苗取苗机构设计与运动仿真
 2024-04-14 225
2024-04-14 225 -
上海地区鲜食玉米全程机械化种植技术方案研究
 2024-04-14 163
2024-04-14 163
作者:闻远设计
分类:课程设计课件资料
价格:5光币
属性:1 页
大小:19.5KB
格式:XLS
时间:2025-02-27










