
机械毕业设计资料-开题报告仿生四足机器人


开题报告
毕业设计(论文)开题报告
四足仿生机器人
开题报告
一、综述
1 研究的意义
仿生学,作为一门研究生物与工程之间相互启发和模仿的学科,其先进性在于能够汲取自然界亿
万年的进化智慧,将这些智慧应用于工程技术和机器人设计中。四足机器人的仿生设计,正是基于
对动物如马、狗等四足行走生物的深入研究和模仿,从而创造出能够在复杂地形中稳定行走的机器
人。这种技术的先进性不仅体现在其高度的适应性上,更在于其对于机器人这种技术的先进性不仅
体现在其高度的适应性上,更在于其对于机器人自主导航、感知和决策能力的显著提升。相较于传
统的轮式或履带式机器人,仿生四足机器人具有更高的灵活性。它们能够在崎岖不平的地形上自由
行走,甚至能够完成跳跃、攀爬等复杂动作。这种灵活性使得四足机器人在救援、勘探、军事等领
域具有广泛的应用前景。例如,在地震救援中,四足机器人可以穿越倒塌的建筑物,到达救援人员
难以进入的区域,为救援工作提供宝贵的信息和支持。仿生四足机器人的研究不仅推动了机器人技
术的发展,更极大地拓展了机器人的应用领域。
从最初的工业生产线,到如今的服务业、医疗、军事等多个领域,机器人的身影已经无处不在。
仿生四足机器人的出现,使得机器人能够更深入地渗透到人们的日常生活和工作中,为人类的生产
和生活带来更多的便利和可能性。仿生四足机器人的研究,是自然与人工智能完美融合的一个缩影 。
它不仅仅是技术层面的创新,更是哲学层面对人与自然关系的深入思考。通过研究生物的行走方式 、
感知方式等,人们可以更加深入地理解生命的奥秘,并将这些理解转化为实际的工程技术,推动人
工智能的发展。仿生四足机器人的研究不仅推动了机器人技术的进步,还对其他领域如传感器技术 、
控制技术、材料科学等产生了积极的影响。它促进了这些领域的技术革新和发展,为整个社会的进
步和发展做出了积极的贡献。
虽然仿生四足机器人具有众多的优势和前景,但其在研究和发展过程中也面临着许多挑战,如
机械结构的复杂性、控制系统的稳定性、环境适应性等问题。然而,这些挑战同时也为研究者提供
了巨大的机遇。通过解决这些问题,人们不仅可以推动机器人技术的发展,还可以为其他领域的技
术创新提供思路和方法。
2 研究的现状及现有成果
起源在20 世纪 60 年代,四足步行机器人的研究已经开始起步。随着计算机技术的快速发展和
机器人控制技术的研究和应用,到了 20 世纪 80 年代现代四足步行机器人的研究已经进入了广泛开
展的阶段。
国外对四足机器人的研究:近几年,美国的波士顿动力公司的产品尤其以 BigDog 系列四足机
器人广泛地出现在大众视野中。BigDog 俗称“大狗”,是一款仿生四足机器人。爬行速度最高达
10km/h,最大可攀爬 35 度斜坡,能够适应各种不同地质环境,最大承载达50kg。BigDog 四肢均由
液压驱动,每条腿有4个自由度:小腿和大腿各一个纵向自由度,分别由一个液压缸驱动;胯部有
纵向和横向两个自由度,由两个液压缸驱动,全身共16 个自由度。
1

开题报告
图一:美国 Boston 公司的四足机器人 Bigdog
国内对四足机器人的研究:在2021 年,我国宇树科技公司发布了最新产品Unitree Go1,这是
全球首款消费级高性能四足机器人产品,产品核心传感器、电机,及减速器等核心零部件均为宇树
科技自主研发。相较于以往四足机器人需要先通过摄像头、激光雷达识别再跟随人不同,采用无线
定位和控制技术的 Go1,只需处在人的余光范围即可跟随。续航时间为 1 个多小时,最快时速可
以达到 17 公里,相当于普通人骑自行车的速度。
图二:我国宇树公司首发的 Go1 四足机器人
国内外比较:从地区分布上说,国外对四足机器人的研究起步早、基础厚、水平高。对四足
器人的驱动方式、运动形式、稳定依据判定等存在技术分歧的部分都进行过各种技术探索与科学尝
试,多传感器融合技术也得到初步验证。尤其应当看到的是,美国最新一代样机已经接近实用,这
使其居于世界领先的地位。国内对四足机器人的研究因起步晚、基础弱、水平低,特别是在系统理
念、关键器件、基础术等方面存在较大差距等原因,在四足机器人的行进速度、负载能力等硬性指
标上以及针对地形和扰动的自适应控制技术方面均和国外研究水平相差甚远,需要奋起直追,迎头
赶上。
二、研究内容
1研究方向、研究内容、系统功能
从技术层面看,四足机器人从最初的完全人工操作到现在具有一定的智能化程度其相关技术如
1
开题报告
计算机视觉、自动控制、人工智能、步态规划和能源供应等都取得了较大的进展。同时,四足机器
人在步行适应性方面已经有了长足的进步。随着微处理器性能的步提升,越来越先进的理论和算法
将会被应用到四足机器人的步态控制中,通过控制统、机械系统、环境之间的相互耦合传递运动,
使四足机器人具有良好的稳定性和适应性。研究内容主要涉及到生物力学模仿,究真实动物(如猫、
狗或其他四足动物)的运动机理,通过观察和分析其骨骼结构、肌肉布局、关节活动等,来设计机
器人的结构和运动方式。动力学与控制,开发高效的动力学模型来模拟机器人的物理行为,设计稳
定且灵活的控制算法来管理机器人的平衡、步态、速度和方向等。.机械设计与材料,设计结构紧
凑、重量轻、强度高的机械部件,选择合适的材料来制造机器人,以提高其耐用性和效率。最后实
现的系统功能包括自主行走和奔跑,可以平稳的进行行走和奔跑的运动功能。并且结构有一定稳定
和刚度,以降低维修成本,同时尽可能的结构简单化减小重量和模型大小,以符合要求。
2基本要求
(1)完成四足仿生机器人的方案设计; 设计具有质量小运动灵活的四足仿生机器人,尺寸规模要
求小于 140cm*75 cm *130 cm,质量小于20kg。完成平衡、全方位行走的功能。
(2)完成四足仿生机器人的机械结构设计,并完成装配图和关键零部件图,图纸量需达
到专业要求。
分析系统关键零部件的受力,完成机械外购件选型;
(4)对控制过程所需要的传感器进行设计选型;
(5)完成四足仿生机器人的控制系统硬件设计,主要包括:控制器、电机、传感器的选型设计,
绘制机器人电气控制原理图;
(6)对重要零部件的刚度强度校核和优化
三、实现方法及预期目标
方案一曲柄摇杆机构
可以基于曲柄摇杆机构来实现,这样的设计能够使机器人在行走时更稳定和流畅。曲柄摇杆机
构包括曲柄和摇杆两个部分,它们之间通过连接杆连接。曲柄与固定轴连接,可以通过电机的转动
带动曲柄旋转;摇杆则与机器人的腿部连接,通过曲柄的旋转带动摇杆运动,从而实现机器人的行
走。主要机械结构,包括四个基于曲柄摇杆机构的腿部,以及机器人的身体和连接部分。
1

摘要:
展开>>
收起<<
开题报告毕业设计(论文)开题报告四足仿生机器人开题报告一、综述1研究的意义仿生学,作为一门研究生物与工程之间相互启发和模仿的学科,其先进性在于能够汲取自然界亿万年的进化智慧,将这些智慧应用于工程技术和机器人设计中。四足机器人的仿生设计,正是基于对动物如马、狗等四足行走生物的深入研究和模仿,从而创造出能够在复杂地形中稳定行走的机器人。这种技术的先进性不仅体现在其高度的适应性上,更在于其对于机器人这种技术的先进性不仅体现在其高度的适应性上,更在于其对于机器人自主导航、感知和决策能力的显著提升。相较于传统的轮式或履带式机器人,仿生四足机器人具有更高的灵活性。它们能够在崎岖不平的地形上自由行走,甚至能...
相关推荐
-
核桃分选机设备的研究现状与问题分析
 2024-04-09 163
2024-04-09 163 -
果园挖坑施肥机械的设计与实现
 2024-04-09 131
2024-04-09 131 -
国内外膜上移栽机的发展现状及问题分析
 2024-04-09 238
2024-04-09 238 -
国内外翻转犁研究及发展现状
 2024-04-09 256
2024-04-09 256 -
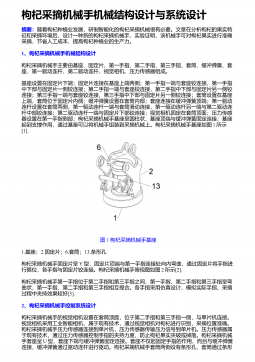
枸杞采摘机械手机械结构设计与系统设计
 2024-04-09 219
2024-04-09 219 -
1K-500自走式果园施肥开沟管理机的设计
 2024-04-09 186
2024-04-09 186 -
基于无线传感器网络的农田环境信息监测平台
 2024-04-12 92
2024-04-12 92 -
花生收获机的行驶机构建模和挖掘铲自适应控制
 2024-04-12 177
2024-04-12 177 -
穴盘苗取苗机构设计与运动仿真
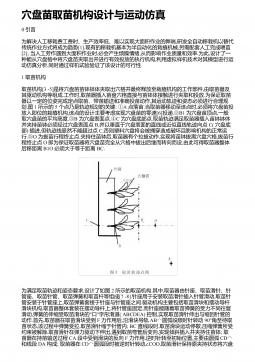 2024-04-14 225
2024-04-14 225 -
上海地区鲜食玉米全程机械化种植技术方案研究
 2024-04-14 163
2024-04-14 163
作者:闻远设计
分类:课程设计课件资料
价格:10光币
属性:10 页
大小:829.86KB
格式:DOCX
时间:2024-08-27










