
基于并联结构的六足机器人设计-开题报告-机械毕业设计资料


本科毕业设计开题报告
课题名称 基于并联结构的六足机器人设计
一、研究的背景、目的和意义
1.研究的背景和意义
按照机器人的移动方式划分,机器人可以分为轮式移动机器人、腿式移动机器人、履
带式移动机器人和复合式移动机器人。其中腿式机器人的适应能力昀强但移动效率昀低,
轮式效率昀高而环境适应能力较差,履带式机器人利用履带可以缓和地面凹凸不平具有
良好的稳定性和越障能力但整体机构笨重消耗功率相对较大。随着社会的快速发展与进
步,机器人技术在现代社会被很多领域所使用[1]。
例如,航空科技类、工业机械类、教育培养类、救援勘测类、医疗类等等,机器人在这
些领域发挥着重要的作用,在工业领域帮助工人解决复杂的问题,缩短工作的时间,提
高工作效率,降低人工成本[2];在教育培养领域,老师利用机器人来对学生进行培训教
学,老师操作机器人并对学生教授机器人的结构原理与控制原理,极大的提高了学生的
学习兴趣与学习效率,培养学生的创新思维能力与动手实践能力;在救援勘测方面,机
器人可以去恶劣环境工作,可以规避一些可能发生的伤亡风险,从而实施救援或勘测工
作;医疗方面,机器人的应用更为广泛,各种微型机器人帮助医生观察病情,做出更加
精确与准确的判断,降低误诊率。为了应对更复杂的环境,人类不断地向机器人寻求帮
助,足式机器人应运而生。足式机器人一般可根据腿的数目分为两足、四足和六足机器
人。这其中六足机器人的研发产生多来源于科学家对六足生物的观察,通过研究发现,六
足生物的形态在行走中更为稳定,且更容易适应不同的地形环境。六足机器人具有高仿生
性、机械感强烈的优点,对于广大青少年具有强烈吸引力,是启发他们投身机器人与人工
智能技术的优良启蒙装置。而足式机器人按照结构连接形式的不同,可分为并联结构的足
式机器人与串联结构的足式机器人。传统的串联机器人是由多个关节相互链接并且多个关
节通过连杆连接形成。串联机器人具有操作灵活,而且具有较大的运动空间,由于这些特
点,因此在足式机器人中占有很重要的地位,我们常见的两足机器人与四足机器人多为
串联结构的。但同时,串联机器人也有着缺点,传统的串联机器人关节较多,导致在运动
过程中的累积误差较大,因此精度相对较低。同时,在位姿求解过程中,串联机器人它的
正向运动学求解简单,但逆向运动学求解困难。并联机器人则不同于串联机器人,首先结
构上差别很大,并联机器人由上平台和下平台以及一些运动连杆和铰接点连接而成,若

想要改变上平台位置和姿态,只需要去改变运动杆的长度即可。该结构很稳定,且具有很
强的承载能力。同时,并联机器人还有着动力学特性好,累积误差小,精度高等特点。而
且在通常的设计中,往往把并联机器人设计成对称的形状,这就使得并联机器人会有着
更好的互换性。此外,并联机器人的逆向运动学求解很容易,但正向运动学求解困难。正
是由于以上种种特点,极大的弥补了串联机器人在某些方面的不足之处,并联机器人也
在越来越多的领域被使用。比如在飞行领域方面,使用并联机器人来进行飞行模拟,方便
飞行员的日常训练;同时在航空领域并联结构也有应用,在我国的嫦娥五号探测器中,
其登陆器就是并联机器人。
二、国内外文献综述
1、国外研究现状
国外对于六足机器人的研究由来已久,20 世纪 70 年代初,罗马大学的 Petternella 带
领他的助手研发了一个六足步行机器人[3]。它是一个可以由电脑完全控制的步行机器人,
但是只能进行直线的移动行走,不可转向。此后到 1977 年,俄亥俄州立大学 McGhee 及
他的团队,设计了一个名为“OSU Hexapod”的六足步行机器人,这款机器人添加了诸多
传感器来帮助控制几起几人,它的每条腿有三个自由度。卡内基梅隆大学在 1983 年设计
研制了第一个载人的六足机器人,名为“六足液压步行者”,这款机器人长宽约 2.4m,重
约810kg,采用汽油发动机作为动力源并使用液压系统作为驱动系统。六足液压步行者开
创了载人六足机器人的先河[4]。2001 年,名为“Rhex”的六足机器人被凯斯西储大学设计出
来,该机器人每条腿有一个自由度,为能够适应更为复杂的地形,该机器人的腿部设计
采用了柔顺结构并且也具有一定的防水和防摔的功能。2009 年,世界上最大的载人六足
机器人“Mantis” 被英 国 工程师 Matt Denton 设计开发出来,历时3 年之久才设 计 完
成,Mantis 高达 2.8m,重 2.3 吨,触手展开可以最远可达 4.5m,不仅如此它的每条腿都
有三个自由度。它的每个腿都由液压缸进行驱动,可以实现远程控制 [5]。2014 年,名为
“LAURON -V”的六足机器人由德国卡尔斯鲁厄 FZI(信息技术研究中心发)[6],它具有
在复杂环境下行走的能力。2019 年,美国卡耐基梅隆大学开发了“T-Rhex”六足机器人,
在之前“Rhex”六足机器人基础上进行了改进,它可以悬挂于墙壁,具有更强的爬坡能力。
2、国内研究现状
国内对并联机器人的研究,在 1991 年,燕山大学的黄真教授便研发了第一台带有实
验性质的六自由度并联机器人[7],从 1993 年开始我国也在飞行模拟器方向开始进入研

摘要:
展开>>
收起<<
本科毕业设计开题报告课题名称基于并联结构的六足机器人设计一、研究的背景、目的和意义1.研究的背景和意义按照机器人的移动方式划分,机器人可以分为轮式移动机器人、腿式移动机器人、履带式移动机器人和复合式移动机器人。其中腿式机器人的适应能力昀强但移动效率昀低,轮式效率昀高而环境适应能力较差,履带式机器人利用履带可以缓和地面凹凸不平具有良好的稳定性和越障能力但整体机构笨重消耗功率相对较大。随着社会的快速发展与进步,机器人技术在现代社会被很多领域所使用[1]。例如,航空科技类、工业机械类、教育培养类、救援勘测类、医疗类等等,机器人在这些领域发挥着重要的作用,在工业领域帮助工人解决复杂的问题,缩短工作的时...
相关推荐
-
核桃分选机设备的研究现状与问题分析
 2024-04-09 163
2024-04-09 163 -
果园挖坑施肥机械的设计与实现
 2024-04-09 131
2024-04-09 131 -
国内外膜上移栽机的发展现状及问题分析
 2024-04-09 238
2024-04-09 238 -
国内外翻转犁研究及发展现状
 2024-04-09 256
2024-04-09 256 -
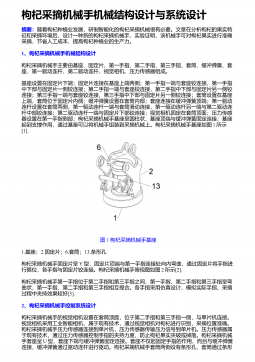
枸杞采摘机械手机械结构设计与系统设计
 2024-04-09 219
2024-04-09 219 -
1K-500自走式果园施肥开沟管理机的设计
 2024-04-09 186
2024-04-09 186 -
基于无线传感器网络的农田环境信息监测平台
 2024-04-12 92
2024-04-12 92 -
花生收获机的行驶机构建模和挖掘铲自适应控制
 2024-04-12 177
2024-04-12 177 -
穴盘苗取苗机构设计与运动仿真
 2024-04-14 225
2024-04-14 225 -
上海地区鲜食玉米全程机械化种植技术方案研究
 2024-04-14 163
2024-04-14 163
作者:闻远设计
分类:课程设计课件资料
价格:10光币
属性:5 页
大小:32KB
格式:DOC
时间:2024-08-27










