
基于两杆张拉机构的折纸机器人开题报告


湖北理工学院 毕业设计(论文)开题报告
湖北理工学院
2023 届毕业设计(论文)开题报告
题目:基于两杆张拉机构的折纸机器人
学 院: 机电工程学院
专 业:
班 级:
学生姓名:
学 号:
指导教师: 崇哲文
职 称: 助教(高校)
(任务起止日期 2022 年 10 月26 日至 2023 年 4月 23 日)
系 主 任: 李涛
2022 年 12 月 30 日
湖北理工学院教务处制

1
湖北理工学院 毕业设计(论文)开题报告
一、课题来源、选题的目的及意义
可移动机器人是一种能够独立完成作业的机械装置,目前很多国家的学者都
对可移动机器人进行深入的研究。可移动机器人可以充分地利用预编程序。这些
程序都是按照自己的指令来的[1],可以接收到人类的远程控制。可移动机器人的
基本使命是取代人类在一些基础的和重要的领域去做大量的重复性、高危性和高
保密性的工作,还包括人类也不能完成的工作,以至于改善社会生产力。现代可
移动机器人主要采用单种运动模式和复合运动模式的两种可移动机器人[2]。履带
式机器人(Tracked Robots)、腿式机器人(Legged Robots)以及轮式机器人
(Wheeled Robots)可称为单种运动模式可移动机器人;由多个单种动作模式组
成的复合式移动机器人大致可区分为轮式或者腿式机器人[3]。可移动机器人面向
的范围很广泛,是综合类的研究,且研究范围不仅仅局限于日常生活工作,在比
如医学或科学方面等一些重要工作中甚至是纳米材料的应用都有所涉及,并且得
到了广泛的应用[4]。由于其运动方式、智能化等特点,使得它在越来越多的领域
都得到广泛的应用。随着科学家们不断地探索和更新机器人,它会在人类居住的
或非人类居住等未知的地方出现。由于现有的机器人在不同的环境下占地面积的
大小、稳定性、适应性、动作状态等方面的问题[4],迫切需要设计一种能够适应
不同复杂环境的新型移动机器人。
目前可移动机器人的占空间大小和重量都较大,特别是一些需要在狭窄区域
工作的时候,大型移动机器人不能满足工作的需要[5],折纸机构引用到可移动机
器人的设计中大大解决了这个问题,目前关于折纸机器人方面的研究而也在稳步
进行中,但是折纸机器人机构的稳定性以及平衡性低,且机器人的机械结构一般
是由不同构件组成的。传统的刚性机构由于其结构的复杂性,在加工过程中不可
避免地产生摩擦、损耗和误差等,在现代可移动机器人的设计需求中,应尽量避
免和解决上述情形。这时,一种新型的张拉整体结构被发现,张拉整体结构与传
统刚性机构不同之处在于[6],它是由不连续的压杆以及连续的拉杆构成的,该结
构重量较轻且随着机构体积的增大单位面积增加幅度小。本文将张拉整体结构应

2
湖北理工学院 毕业设计(论文)开题报告
用到折纸机器人的设计中[7],为移动机器人的设计提供了新方法和新思路。随着
可移动机器人在实际生活中的普遍应用,更多的机构和结构问题也随之产生。因
此,本文将张拉整体结构应用到折纸机器人中,解决机器人的占据空间问题以及
机器人稳定性和平衡性的问题。
二、国内外的研究概况及发展趋势
国内研究
对于移动机器人的研发工作我国在 20 世纪初期就已经开展了,我国
相对于世界上其它几个主要国家来说在这一领域的发展相对滞后,但是研
发工作却很迅速。我国的很多研究学者都在很早的时候就开始了对移动机
器人的探究。如中国科学院沈阳自动化研究所于建刚等研究员对遥控移动
机器人展开了研究、马兆青教授来自清华大学利用栅格法完成移动机器人
的导航功能及躲避障碍功能、北京航空航天大学沈林成等研究员对移动机
器人数字地形模型展开了研究、河北工业大学的研究员们提出了关于移动
机器人基于神经网络和模糊逻辑技术的防撞措施宋哲等研究者来自西安电
子科技大学研制了一种以折纸为基础的可以移动的四足机器人。将折纸机
构用 PVC 硬塑料板进行厚板化,利用折纸机构的原理[8],不仅解决了传统
的机器人占用空间的大小以及运动复杂的问题,同时减少了机器人的所需
要的驱动数量,如下图 1.1 所示
图 1-1 基于折纸的行走机器人

摘要:
展开>>
收起<<
湖北理工学院毕业设计(论文)开题报告湖北理工学院2023届毕业设计(论文)开题报告题目:基于两杆张拉机构的折纸机器人学院:机电工程学院专业:班级:学生姓名:学号:指导教师:崇哲文职称:助教(高校)(任务起止日期2022年10月26日至2023年4月23日)系主任:李涛2022年12月30日湖北理工学院教务处制1湖北理工学院毕业设计(论文)开题报告一、课题来源、选题的目的及意义可移动机器人是一种能够独立完成作业的机械装置,目前很多国家的学者都对可移动机器人进行深入的研究。可移动机器人可以充分地利用预编程序。这些程序都是按照自己的指令来的[1],可以接收到人类的远程控制。可移动机器人的基本使命是取...
相关推荐
-
底座数控加工工艺的编制及自动编程【三维UG】

 2022-10-22 223
2022-10-22 223 -
基于UG的异形底座零件数控加工工艺分析与编程(含-审选题审题表-任务书-开题)
 2022-10-22 171
2022-10-22 171 -
风力驱动器底座数控加工机械毕业设计
 2022-10-22 348
2022-10-22 348 -
伺服马达前端盖零件的数控加工工艺及编程
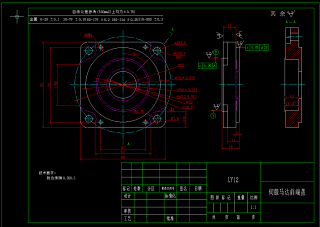 2022-10-22 191
2022-10-22 191 -
卡座零件三维设计及数控加工仿真(三维+CAD+说明书)
 2022-10-22 342
2022-10-22 342 -
五角形板的数控加工工艺及编程仿真(CAXA)(说明书+三维+CAD二维图)
 2022-11-02 256
2022-11-02 256 -
电机盖板零件数控加工中心加工工艺设计(仿真视频+CAD+说明书)
 2022-11-05 359
2022-11-05 359 -
基于UG环境下的数控零件铣削工艺分析与仿真加工(机械毕业设计+说明书+CAD)
 2022-11-18 235
2022-11-18 235 -
核电冷却泵模型三维建模与纺锤螺扇零件多轴仿真加工
 2023-01-25 316
2023-01-25 316 -
复杂盖板类零件加工工艺设计和自动编程毕业设计说明书
 2023-07-14 350
2023-07-14 350
作者:闻远设计
分类:课程设计课件资料
价格:10光币
属性:11 页
大小:1.21MB
格式:DOCX
时间:2023-07-15










