
轮履式变结构全方位移动机器人运动学分析与结构-原创机械毕业设计资料-三维-CAD-运动仿真视频-创意机械毕业设计
- 文件清单
- A0-轮履全方位移动车.DWG--点击预览
- A2-从动轮组件.DWG--点击预览
- A2-轮履变换轮组件.DWG--点击预览
- A2-轮轴.DWG--点击预览
- A3-从动轮.DWG--点击预览
- A3-电机安装板.DWG--点击预览
- A3-连杆3.DWG--点击预览
- A3-中间连接板.DWG--点击预览
- A4-连杆1.DWG--点击预览
- A4-铜套.DWG--点击预览
- A4-中间转轴.DWG--点击预览
- A4-轴端盖.DWG--点击预览
- QQ截图20240216212430.jpg--点击预览
- 轮履变换轮组件_仿真视频.avi--点击预览
- 轮履式变结构全方位移动机器人运动学分析与结构说明书.docx--点击预览
- 三维.zip--点击预览
摘要:
展开>>
收起<<
为了满足复杂情况的要求,设计一种新型轮履式复合底盘,使工程机械可根据路况不同实现轮胎式行走和履带式行走的灵活自由切换,更加快捷方便地展开工作。轮履式复合底盘能弥补传统底盘的缺陷,发挥轮式底盘和履带式底盘的各自优势,具有强大的施工能力和快速的转场能力。针对时间紧迫的战争施工和救灾抢险,繁重的施工任务和复杂地形的道路条件,轮履式复合底盘工程机械的优势完全能充分发挥出来。因此,轮履式复合底盘是工程机械领域的一个重大突破,并且能够广泛适用于国防建设、救援抢险、野外施工、越野车辆、机器人研发等领域。 本课题的设计重点是轮式和履带式移动结构的变换机构,确定变换的形式及变换的方案是能够完成课题设计内容的前提条件。因此首先对变换机构的方案进行确定,之后根据设计的方案进行轮系布置、驱动电机的计算和选型,同时对方案中的主要传动部件进行计算和选型、校核以及使用设计软件进行三维模型和二维图纸的绘制。


相关推荐
-
轴的设计计算参考公式
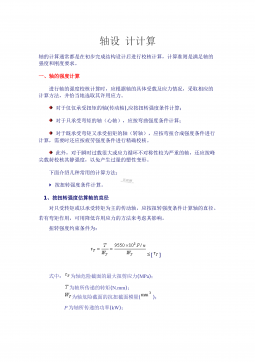
 2023-07-08 909
2023-07-08 909 -
29542字硕士毕业论文韩少功的小说创作与湘西民间文学文化
 2023-07-10 170
2023-07-10 170 -
11904字开题报告专业学位研究生论文开题报告——XX市商业银行农业企业贷款风险管理问题及对策研究
 2023-07-10 76
2023-07-10 76 -
农业机械化概念界定与理论基础,农业机械狭义定义简介
 2023-07-19 79
2023-07-19 79 -
开题报告在线电磁钢轨探伤数据处理及信息管理方法研究
 2023-08-30 119
2023-08-30 119 -
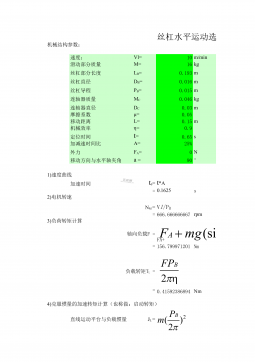
丝杠规格及选型
 2025-02-27 93
2025-02-27 93 -
统编版(2025年)七年级道德与法治上册期末复习知识点考点背诵清单【附:1-13课全册教学设计】
 2025-09-02 106
2025-09-02 106 -
2025年统编版七年级道德与法治上册期末复习知识点考点背诵清单与教材活动课参考答案
 2025-09-02 75
2025-09-02 75 -
2025年新教材统编版七年级上册《道德与法治》教材活动课参考答案(两份供参考)
 2025-09-02 139
2025-09-02 139 -
2025年教科版小学三年级上册《科学》第一单元水第2课水沸腾了教学课件
 2025-09-02 70
2025-09-02 70
作者:闻远设计
分类:非标机械电气自动化
价格:200光币
属性:16 个文件
大小:21.7MB
格式:ZIP
时间:2024-02-16










