X射线实时影象探伤管道机器人的关键技术

附录 A
X 射线实时影象探伤管道机器人的关键技术
摘要
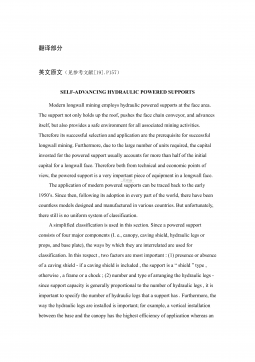
这篇论文介绍了一种检查大口径管道焊接连接的机器人系统,它被发展作
为 X 射线实时图象检查法 [RTIIT]的自动化平台。该机器人在管道内可以独立
寻找并确定焊接接缝位置,在同步控制技术的控制下可以完成对焊缝进行质量
检验的任务。该机器人系统安装有一个小的焦点和具有定向波束的 X 射线管,
因此可以获得清晰度较高的焊接接缝图像。关于该机器人系统个别的关键技术
也将被详细说明。它的结构是(?) 。
关键词:X 射线探伤、实时影象、机器人
0 介绍
与射线照相检查方法(RET)相比较,X 射线实时图像检查法(RTIIT)有
许多优势,比如较高的效率、较低的成本,更容易实现自动化和对焊接缺陷进
行即时评估。此外,最新的技术允许 X 射线 RTIIT 被用在对管道进行无损检测
(NDT),并且这个方法的检查品质和 RET[1,2]是一样的。因此,无损检测设备,
通常用于管道检验的基于 RET 的设备,需要通过改造变成基于 X 射线实时图像
检查法的。
使用 X 射线实时图像检查法对管道进行无损检测一定要有一个自动化平台,
X 射线探伤实时影象管道机器人(irtipr)就是为该目的而设计的。事实上,
除了已经被解决[3]的涉及 X 射线探伤实时影象管道机器人的问题之外,一些集
中在机器人的智能控制的关键技术也出现在这篇论文中。,例如,机器人在管
道内的独立动作,同步控制技术和在管道内外之间信息交流配合,我们也将机
器人的结构( ? )。
1 机器人的工作原理
这个 X 射线探伤实时影象管道机器人由管道内和管道外两部分组成,结构
详见图 1。管道外的部分由图像采集处理系统(8,9,10),管道外同步旋转
机构和它的驱动系统(11,12)组成。图像扩大器由管道外旋转机构来推动并
围绕管道中心旋转进行采集焊接图像及通过图像采集卡将图象信号传达给图像
处理计算机。管道内的部分由管道内电脑(1)、电源和换流器系统(2)、行
走及其驱动系统(3)、X 射线系统(4)、管道内同步旋转机构及其驱动系
统(5,6)和焊接接缝独立寻找及定位系统(7)。X 射线系统中的 X 射线管由
管道内的旋转机构推动围绕管道的中心旋转。

图 1 X 射线探伤实时影象管道机器人的结构
机器人主要工作原理说明如下:在焊接接缝独立寻找及定位系统的控制下管内爬行器
完成工作位置的定位,并在定位的位置上处于等待的状态。当它收到从管道外由低频电磁
波传达的指令信号时,管道内的电脑立即操纵 X射线系统的控制器来实现管道外的控制。
管道内和管道外的旋转机构由同步控制技术控制围绕相同的管道中心旋转并按旋转 -照射-
旋转的方式完成焊接接缝检查。
2 机器人的控制系统
与工艺步骤的工作原理相比,X射线 irtipr 的控制系统主要由一些关键技术组成,例如
以X射线图象标准检查程序为基础的同步控制技术和以数据合成及低频电磁波传递为基础
的焊接接缝独立寻找及定位技术。
2.1 管道内和管道外旋转机构的同步控制技术
根据 X 射线实时图象检查法的技术要求,X 射线管和图像增强器必须围绕
同时地同一个中心旋转。因为 X 射线 irtipr 采用无线的工作方式,机器人管道
内同管道外的部分是不可能的由电缆连接着的。如何在管道内外旋转机构的控
制系统之间实现同步信息通信,或如何实现同步控制,变成必须被解决的关键
技术。
同步旋转可以被描述为:当管道内的旋转机构带动 X 射线管到旋转 α角时,
管道外的旋转机构也带动图像增强器同时绕同样的中心旋转到相同的角度(图
2)。因为金属管道的遮挡作用和无线的特征,现有的通信手段很难完成在管道
内外控制信息的通信(4,5)。根据 X 射线探伤实时影象管道机器人的特殊性,
我们提出这同步控制方案如下:将一个垂直于焊接接缝的标准检查程序导线设
置在 X 射线管的照射窗上;当 X 射线照射到焊接接缝时,标准检查程序导线也
在管道外的电脑上成像。只要管道内和管道外旋转机构处于同步的位置,即 X
射线管的照射窗和图像增强器的轴是重合的(α=0)(图 2),标准检查程序导
线成像在电脑屏幕的中心位置。标准检查程序导线的成像和标准检查程序的中

摘要:
展开>>
收起<<
附录AX射线实时影象探伤管道机器人的关键技术摘要这篇论文介绍了一种检查大口径管道焊接连接的机器人系统,它被发展作为X射线实时图象检查法[RTIIT]的自动化平台。该机器人在管道内可以独立寻找并确定焊接接缝位置,在同步控制技术的控制下可以完成对焊缝进行质量检验的任务。该机器人系统安装有一个小的焦点和具有定向波束的X射线管,因此可以获得清晰度较高的焊接接缝图像。关于该机器人系统个别的关键技术也将被详细说明。它的结构是(?)。关键词:X射线探伤、实时影象、机器人0介绍与射线照相检查方法(RET)相比较,X射线实时图像检查法(RTIIT)有许多优势,比如较高的效率、较低的成本,更容易实现自动化和对焊接...
相关推荐
-
轴的设计计算参考公式
 2023-07-08 949
2023-07-08 949 -
29542字硕士毕业论文韩少功的小说创作与湘西民间文学文化
 2023-07-10 170
2023-07-10 170 -
11904字开题报告专业学位研究生论文开题报告——XX市商业银行农业企业贷款风险管理问题及对策研究
 2023-07-10 76
2023-07-10 76 -
农业机械化概念界定与理论基础,农业机械狭义定义简介
 2023-07-19 79
2023-07-19 79 -
开题报告在线电磁钢轨探伤数据处理及信息管理方法研究
 2023-08-30 119
2023-08-30 119 -
丝杠规格及选型
 2025-02-27 93
2025-02-27 93 -
统编版(2025年)七年级道德与法治上册期末复习知识点考点背诵清单【附:1-13课全册教学设计】
 2025-09-02 106
2025-09-02 106 -
2025年统编版七年级道德与法治上册期末复习知识点考点背诵清单与教材活动课参考答案
 2025-09-02 75
2025-09-02 75 -
2025年新教材统编版七年级上册《道德与法治》教材活动课参考答案(两份供参考)
 2025-09-02 139
2025-09-02 139 -
2025年教科版小学三年级上册《科学》第一单元水第2课水沸腾了教学课件
 2025-09-02 70
2025-09-02 70
作者:设计吧
分类:其它行业资料
价格:10光币
属性:4 页
大小:267.24KB
格式:DOCX
时间:2023-02-13