
应用坐标测量机的机器人运动学姿态的标定


南京理工大学泰州科技学院
毕业设计(论文)外文资料翻译
系 部: 机械工程系
专 业: 机械工程及自动化
姓 名: 钱 瑞
学 号: 0501510131
外文出处:The Internation Journal of Advanced
Manufacturing Technology
附 件: 1. 外文资料翻译译文; 2. 外文原文。
(用外文写)

指导教师评语:
签名:
年 月 日
注:请将该封面与附件装订成册。

附件 1:外文资料翻译译文
应用坐标测量机的机器人运动学姿态的标定
这篇文章报到的是用于机器人运动学标定中能获得全部姿态的操作装置——
坐标测量机(CMM)。运动学模型由于操作器得到发展, 它们关系到基坐标和工件
工件姿态是从实验测量中引出的讨论, 同样地是识别方法学。允许定义观察策略的
完全模拟实验已经实现。实验工作的目的是描写参数辨认和精确确认。用推论原则
的那方法能得到在重复时近连续地校准机器人。
关键字:机器人标定 坐标测量 参数辨认 模拟学习 精确增进
1. 前言
机器手有合理的重复精度 (0.3毫米)而知名, 但仍有不好的精确性(10.0 毫米)。
为了实现机器手精确性,机器人可能要校准也是好理解 。 在标定过程中, 几个连
续的步骤能够精确地识别机器人运动学参数,提高精确性。这些步骤为如下描述:
1 操作器的运动学模型和标定过程本身是发展,和通常有标准运动学模型的工
具实现的。作为结果的模型是定义基于厂商的运动学参数设置错误量, 和识别未知
的,实际的参数设置。
2 机器人姿态的实验测量法(部分的或完成) 是拿走为了获得从联系到实际机器
人的参数设置数据。
3 实际的运动学参数识别是系统地改变参数设置和减少在模型阶段错误量的定
义。一个接近完成辨认由分析不同中间姿态变量P和运动学参数K的微分关系决定:
于是等价转化得:
两者择一, 问题可以看成为多维的优化问题,这是为了减少一些定义的错误功
能到零点,运动学参数设置被改变。这是标准优化问题和可能解决用的众所周知的
方法。

摘要:
展开>>
收起<<
南京理工大学泰州科技学院毕业设计(论文)外文资料翻译系 部:机械工程系专业:机械工程及自动化姓名:钱瑞学号:0501510131外文出处:TheInternationJournalofAdvancedManufacturingTechnology附件:1.外文资料翻译译文;2.外文原文。(用外文写)指导教师评语:签名:年月日注:请将该封面与附件装订成册。附件1:外文资料翻译译文应用坐标测量机的机器人运动学姿态的标定这篇文章报到的是用于机器人运动学标定中能获得全部姿态的操作装置——坐标测量机(CMM)。运动学模型由于操作器得到发展,它们关系到基坐标和工件工件姿态是从实验测量中引出的讨论,同样地...
相关推荐
-
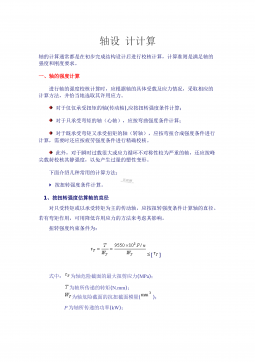
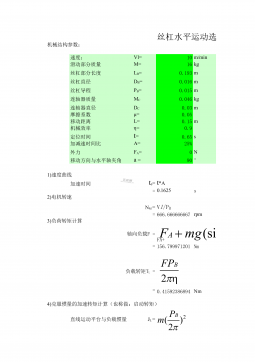
轴的设计计算参考公式
 2023-07-08 949
2023-07-08 949 -
29542字硕士毕业论文韩少功的小说创作与湘西民间文学文化
 2023-07-10 170
2023-07-10 170 -
11904字开题报告专业学位研究生论文开题报告——XX市商业银行农业企业贷款风险管理问题及对策研究
 2023-07-10 76
2023-07-10 76 -
农业机械化概念界定与理论基础,农业机械狭义定义简介
 2023-07-19 79
2023-07-19 79 -
开题报告在线电磁钢轨探伤数据处理及信息管理方法研究
 2023-08-30 119
2023-08-30 119 -
丝杠规格及选型
 2025-02-27 94
2025-02-27 94 -
统编版(2025年)七年级道德与法治上册期末复习知识点考点背诵清单【附:1-13课全册教学设计】
 2025-09-02 106
2025-09-02 106 -
2025年统编版七年级道德与法治上册期末复习知识点考点背诵清单与教材活动课参考答案
 2025-09-02 75
2025-09-02 75 -
2025年新教材统编版七年级上册《道德与法治》教材活动课参考答案(两份供参考)
 2025-09-02 139
2025-09-02 139 -
2025年教科版小学三年级上册《科学》第一单元水第2课水沸腾了教学课件
 2025-09-02 70
2025-09-02 70
作者:闻远设计
分类:课程设计课件资料
价格:15光币
属性:21 页
大小:509.5KB
格式:DOC
时间:2023-09-29










