平行停车系统汽车式机器人传感与制导的研究外文文献翻译、中英文翻译

附录 A
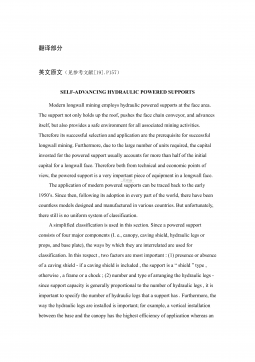
平行停车系统汽车式机器人传感与制导的研究
1制造工程学和产业管理工程系,英国利物浦大学
2机械工程系,英国伦敦大学
摘要:本文对并行策略自动停车系统的汽车类移动机器人进行了研究。这
项研究以一个长方形平行停车空间内利用机器人停车为例。此系统在三个阶段
内运作。在扫描阶段停车处环境由安装在机器人的超音波传感器查出,如果空
间是充足的,停车位置和操纵道路将被显示,然后在定位的阶段机器人扭转停
车位的边缘,避免发生碰撞。最后阶段,在操纵阶段机器人在一个统一的模式下
从停车位移动向停车处位置,根据停车位的空间要求向后和向前回旋。这样确
立非完全限制行动的汽车类机器人行动特征。根据特征,确立一个无碰撞道路
周围环境。研究的策略是在一个通过修改的可移动 B12 机器人上集成了一个自
动化的停放的系统,并且在紧急的情况被验证其可以将车停放在安全位置上。
系统的开发是为了一个自动化的停放的设备以便帮助车司机安全停车。它也显
示了在集成汽车方面的应用潜力。
关键词:行动设计;可移动汽车机器人;停车处;运动学约束;防撞;传感器
制导
记法
a机器人全长的一半;a0机器人参考点的加速度在纵向方向;A障碍;b机
器人身体宽度的一半;B障碍;D在扫描期间从机器人的距离到最近的障碍;F
机器人的参考点;Fm 机器人的移动的框架;h机器人运动在停车空间的纵向距
离hf,hb 参考点 F 到前后移动在停车空间所必需的纵向距离;l移动机器人二
个轴的距离;L停车位的长度;m位形空间的维度;oi机器人在位形 Pi 的瞬间
中心;oiF 从瞬心到机器人参考点的纵向量;pi机器人的位形 i;r沿位形空间的
每个轴分解的值;R可移动机器人;t用于机器人行走的变化的时间;t1用于完
成线性加速度的时间;t2用于以匀速 v0 完成加速度和移动的时间;T用于机器
人以方向参考点速度的行走在轨道阶段上的时间;v机器人纵向参考点的速度;
v机器人在纵向方向参考点的最大速度;w机器人快速移动的机动宽度;wf,wb
参考点 F需要在停车位前后移动的宽度;Wmin 从参考点 F到旁边障碍应该保持
最短距离;W停车位的宽度;W1从机器人位形 Pi 到旁边障碍的距离;x,y 在全
局系统参考点的坐标;xi,yi参考点在活动标架 Fm 的坐标;xm,ymFm 在活动标架
上的 X和Y轴;xoi,yoi 瞬心 Oi 的坐标;α前轮的转向角;αlim 前轮的最大转向角;
Γ用于机器人完成转向阶段的时间;ξ机器人关于整体框架的定位;ξo 在线连接
二瞬心的停车位和X轴之间角;ξi 当机器人沿着弧 i走时,在 机器人和停车位
的纵向方向之间角;ρmin 机器人的最小的轮半径;τ1用于完成角加速度的时间;
τ2用于完成角加速度和在 φ0 匀速运行的时间;φ在拐点角速度;φ0在拐点顶角
速度;φ0‘‘在拐点角加速度。
1 引言
本文是一项关于汽车类可移动机器人应用于平行的停车处问题的研究。这
项研究是在一个发展自动化的汽车停车处系统的研究设计的一部分。此汽车类
机器人模仿一辆四轮车。 机器人的特点和一辆四轮车一样, 例如二个自由度
长方形刚体(DOF),线性 DOF 为向前和向后运动和旋转改变简单的定位。通常,
机器人遵循二个非完全限制的极限转向角和轨道曲度,并且保证机器人移动朝
轨道的正切方向。
研究到汽车停车处问题是从普通运动设计的研究中获得的机器人。在过去
几年,人们开发了一般机器人运动设计许多算法。然而,在停车处制导的设备
的发展过程中,运用这些算法于汽车停车处方案实现一个实时控制结果是困难
的。
位形空间(C 空间)方法是普遍提到的算法,方法将关于机器人的形状和行动
特点简化到点和障碍相应地扩展。C空间汽车机器人移动是将复杂形状的三维
障碍变为二维多角形障碍之中进行研究。建立和搜寻这样 C空间是费时和复杂
的。因此,对可移动机器人运动设计的早期研究考虑圆机器人以减化复杂。
以前研究认为,汽车类机器人特点是典型的长方形形状和受非完全限制支
配。直接地搜寻 C空间的一个无碰撞道路是一个复杂问题,一种解决方法是使
用单元分解。单元分解方法分解 C空间为一些矩形(箱形的元素),并且生成一
个直观的图表。所有矩形在自由配置空间并且每个对毗邻矩形作为图表的一个
结点。算法时间 O(mrm log m)和空间 O(rm)有要求,r是沿位形空间的每个轴分解
的大小的尺寸,m是位形空间的维度。计算时间在使用这种算法被记录要大于
10h,为实时应用充分极限时间之下。
Lafferriere 和Sussmann 基于可调性一般结构的证明首次提出了为汽车机器
人的一般监控系统。Murray 和Sastry 显示了如何为一些标准系统解决问题的方
法。然而,正如由 Sussmann 和刘的观点,指出论文没有处理障碍问题。Jacobs
等提出完全监控系统为可移动机器人改进了情况并且表示它的策略可以被推断。
算法包括三个阶段:
a未完全系统设计一个道路 p
b细分p,直到所有终点可以由一个最小长度无碰撞可行的道路连接
c走优化路线减少道路的长度
以汽车停车处为例,在 Sun SPARC 2 工作站总共运行了 3.7 s。这种算法进
一步被验证了汽车移动机器人在包括一定数量的多角形障碍复杂环境里移动的
可行性。在所举例子之一中,在 Sun SPARC 2 工作站有一个五个障碍被分布在
一个工作区里面,处理时间是 38 s。
近年来,研究的热点侧重在汽车停车处问题。 Paromtchik 和Laugier 提出
了一种方法在平行的停车处应用为一辆非完全约束车。此方法是停车位在车进
入停车处之前入被扫描。而前移是沿着没有斜向位移的一条直线,车在后移时
走一条正弦道路。因为在回旋期间没有适当的方法处理在停车处可预料的碰撞,
方法是在停车位之内使用查寻表,创建非运行表,为进入停车位估计一种无碰
撞开始状态和为回旋在停车位之内估计运行时间。此方法没有涉及在车和停车
位的纵向界限之间可能存在的碰撞情况。其他研究关于使用各种各样的结构和
控制的技术最近涌现出来,例如神经网络和模糊控制。仅几篇论文谈论为汽车
建立一个自动停车处系统的事例。Divelbiss 和Wen 提出了包括一个拖车汽车跟
踪和停放的道路方法。在这种方法给定环境和非运行道路,是使用道路空间重
申算法。本文更集中在跟踪不同的汽车拖车系统的弹道,而不是解决自动停车
处问题。Miyata 等研究了平行的停车处问题。用于实验的机器人是一辆自动引
导的车(AGV)。 研究的焦点是运用模糊的规则和下降方法控制AGV 为平行的

摘要:
展开>>
收起<<
附录A平行停车系统汽车式机器人传感与制导的研究1制造工程学和产业管理工程系,英国利物浦大学2机械工程系,英国伦敦大学摘要:本文对并行策略自动停车系统的汽车类移动机器人进行了研究。这项研究以一个长方形平行停车空间内利用机器人停车为例。此系统在三个阶段内运作。在扫描阶段停车处环境由安装在机器人的超音波传感器查出,如果空间是充足的,停车位置和操纵道路将被显示,然后在定位的阶段机器人扭转停车位的边缘,避免发生碰撞。最后阶段,在操纵阶段机器人在一个统一的模式下从停车位移动向停车处位置,根据停车位的空间要求向后和向前回旋。这样确立非完全限制行动的汽车类机器人行动特征。根据特征,确立一个无碰撞道路周围环境。...
作者:设计吧
分类:课程设计课件资料
价格:10光币
属性:35 页
大小:178.55KB
格式:DOCX
时间:2023-02-13