
小型夹持式机械手及手臂设计


1 绪论
1.1 课题研究的目的和意义
机器人是人类很早就梦想制造的、具有仿生性且处处听命于人的自动化机器,它可
以帮助人类完成很多危险、繁重、重复的体力劳动。机器人技术是现代科学技术高度集成
和交融的产物,它涉及机械、控制、电子、传感器、计算机、人工智能、知识库系统以及认
识科学等众多学科领域,是当代最具有代表性的机电一体化技术之一。人类文明的发展
科技的进步已和机器人的研究、应用产生了密不可分的关系。为了适应社会的需求,各
院校都比较重视机器人技术和控制技术等课程在机械设计及其自动化专业的开设,使
培养的学生懂得机器人设计方面的技术。经过 40 多年的发展,现代机器人技术在工业、
农业、国防、航空航天、商业、旅游、医药卫生、办公自动化及生活服务等众多领域获得了
越来越普遍的应用。机器人技术不断进步与创新,所到之处使整个制造业乃至整个社会
都发生了和正在发生着翻天覆地的变化。机器人是最具代表性的现代多种高新技术的综
合体,它可以从某个角度折射出一个国家的科学水平和综合国力。由于社会的需求,造
就了一批从事设计、开发和使用机器人的高级人才。而设计和开发的基础,是对机器人
机械系统、感知系统和控制系统等的理解和掌握,才能较好的使用其中的资源来进行设
计。故此本文介绍了机器人设计的基本理论,讨论了机器人本体基本结构的相关内容,
描述了机器人控制器和传感器等的基本原理,然后再介绍机器人轨迹规划和静力分析
方面的知识,使学生既懂得怎样设计一个机器人,同时能熟练地运用此设计理论。
机器人技术是现代科学技术高度集成和交融的产物,计算机技术的不断肩部和发
展使机器人技术的发展一次次达到一个新的水平。机器人涉及机械、控制、电子、传感器
计算机、知识库系统以及认识科学等诸多学科领域,成为高科技中极为重要的组成部分
人类文明的发展、科技的进步已和机器人的研究、应用产生了不可分的关系。机器人技术
是当代最具代表性的机电一体化技术之一。机器人已广泛地应用于工业、国防、科技、生
活等各个领域。机器人在现代工业中应用得特别广泛,而其与外界环境直接接触的部分
是机械手,它可以代替人手,与外界环境中有毒以及有害的物质直接接触以减少对人
的危害,它具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大
等特点。人类社会的发展已离不开机器人技术,而机器人技术的进步又对推动科技发展
起着不可代替的作用。因此,设计机械手有特别重要的意义。

1.2国内外研究状况
目前,对全球机器人技术发展最有影响的国家应该是美国和日本。美国在机器人技
术的综合研究水平上仍处于领先地位,而日本生产的机器人在数量、种类方面则居世界
首位。机器人技术的发展推动了机器人学的建立,许多国家成立了机器人协会,美国、
日本、英国、瑞典等国家设立了机器人学学位。
20 世纪 70 年代以来,许多大学开设了机器人课程,开展了机器人学的研究工作,
如美国的 MIT、RPI、Stanford、Carnegie-Mellon、Conell、Purdue、Univ of California 等大学
都是研究机器人学富有成果的著名学府。随着机器人学的发展,相关的国际学术交流活
动也日渐增多,目前最有影响的国际会议是IEEE 每年举行的机器人学及自动化国际会
议,此外还有国际工业机器人会议(ISIR)和国际工业机器人技术会议(CIRT)等。出版的
相关期刊有“Robot Today”、“Robotics Research”、“Robotics and Automation”等多
种。
我国的机器人技术起步较晚,约于20 世纪 70 年代末、80 年代初开始。20 世纪 90 年
代中期,6000 以下深水作业机器人试验成功,以后的近10 年中,在步行机器人、精
密装配机器人、多自由度关节机器人的研制等国际前沿领域逐步缩小了与世界先进水平
的差距。
1.3 机械手的特点
机械手最显著的特点有以下几个:
(1)可编程 生产自动化的进一步发展是柔性自动化。机械手可随其工作
环境变化的需要而再编程,因此它在小批量多品种具有均衡高效率的柔性制造过程中
能发挥很好的功用,是柔性制造系统中的一个重要组成部分。
(2) 拟人化 能模仿人手和手臂的某些动作功能,用来按固定程序抓取、
搬运物件或操作工具的自动操作装置。它可代替人的繁重劳动以实现生产的机械化和自
动化,能在有害环境下操作以保护人身安全
(3) 通用性 除了专门设计的专用机械手外,一般机械手在执行不同的作
业任务时具有较好的通用性。比如,更换机械手部末端操作器(手爪、工具等)便可执行
不同的作业任务。
1.4 机械手的组成
作为一个系统,一般来说,机械手由三部分、六个子系统组成。这三部分是机械部
分、传感部分、控制部分;六个子系统是驱动系统、机械系统、感知系统、人机交互系统、
机械手-环境交互系统、控制系统等。
(1) 驱动系统
驱动系统主要指驱动机械系统的驱动装置。根据驱动源的不同,驱动系统可分为电
动、液压、气动以及把它们结合起来应用的综合系统。
(2)机械系统
机械系统又称操作机或执行机构系统,它由一系列连杆、关节或其他形式的
运动副所组成。机械系统通常包括臂关节、腕关节和手爪等,构成一个多自由度
的机械系统。
(3)感知系统
感知系统由内部传感器模块和外部传感器模块组成,获取内部和外部环境状态中
有用的信息。
(4)控制系统
控制系统的任务是根据机械手的作业指令程序以及从传感器反馈回来的信号支配机
械手的执行机构完成规定的引动和功能。
(5)机械手-环境交互系统
工业机械手-环境交互系统是实现机械手与外部环境中的设备相互联系和协调的系统。
(6)人机交互系统
人机交互系统是使操作人员参与机械手控制并与机械手进行联系的装置,一般来
说,人机交互系统可分为两大类:指令给定装置和信息显示装置。
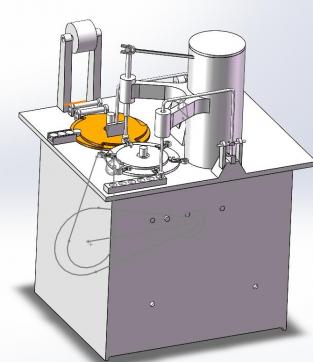
2 总体方案设计
设计机械手的第一步是进行总体方案设计,即在充分调查研究的基础上,进行可行
性分析论证,确定夹持机械手的使用范围、夹持方法、初选各部件的结构和总体布局等。
这是整台机器技术设计的依据。因此,在拟定总体方案时,必须全面地考虑,使确定的
方案既先进有经济效益高。

摘要:
展开>>
收起<<
1绪论1.1课题研究的目的和意义机器人是人类很早就梦想制造的、具有仿生性且处处听命于人的自动化机器,它可以帮助人类完成很多危险、繁重、重复的体力劳动。机器人技术是现代科学技术高度集成和交融的产物,它涉及机械、控制、电子、传感器、计算机、人工智能、知识库系统以及认识科学等众多学科领域,是当代最具有代表性的机电一体化技术之一。人类文明的发展科技的进步已和机器人的研究、应用产生了密不可分的关系。为了适应社会的需求,各院校都比较重视机器人技术和控制技术等课程在机械设计及其自动化专业的开设,使培养的学生懂得机器人设计方面的技术。经过40多年的发展,现代机器人技术在工业、农业、国防、航空航天、商业、旅游、...
相关推荐
-
立式打蛋机设计(全套CAD图纸+说明书+三维设计)

 2022-10-19 470
2022-10-19 470 -
全自动打捆机(机械毕业设计+说明书+全套CAD)
 2022-11-06 244
2022-11-06 244 -
输出轴的数控工艺及主要工装设计(机械毕业设计+说明书+全套CAD)
 2022-11-07 475
2022-11-07 475 -
爬楼梯智能轮椅设计(机械毕业设计+说明书+全套CAD)
 2022-11-20 243
2022-11-20 243 -
红枣去核机的机构设计
 2022-11-23 358
2022-11-23 358 -
枕式包装机设计(机械毕业设计+说明书+全套CAD)
 2022-11-25 718
2022-11-25 718 -
自动盖章机(机械毕业设计+说明书+CAD)
 2022-12-15 999+
2022-12-15 999+ -
挂轮架加工工艺与工装设计(机械毕业设计+说明书+全套CAD)
 2023-01-16 517
2023-01-16 517 -
下肢康复机器人踝关节驱动系统-设计
 2023-10-07 195
2023-10-07 195 -
粒状巧克力糖包装机设计-包含SW设计-机械毕业设计资料-机械毕业设计
 2024-09-30 202
2024-09-30 202
作者:闻远设计
分类:非标机械电气自动化
价格:40光币
属性:33 页
大小:1MB
格式:DOC
时间:2023-07-08










