
基于广义预测自适应控制的电力系统稳定器


基于广义预测自适应控制的电力系统稳定器
电力系统稳定器是电力系统中重要的抑制低频振荡的设备,需要通过复杂的在线整定工
作,才能够保证将低频振荡抑制在一定范围内,但是电力系统稳定器在进行在线整定工作时存
在一定的风险,不能始终保证各个频率段的抑制效果满足相关的设计要求。基于此,人工智能
控制、非线性控制、自适应控制等控制理论相继被应用在电力系统稳定器设计中,文章研究了
一种基于广义预测自适应控制原理的的电力系统稳定器,该电力系统稳定器能够自动调整控制
器输出,能够达到最佳的阻尼效果。
1 广义预测自适应控制的特征
“ ”广义预测自适应控制的特征主要包括以下几个方面:其一,每一个 当前采样时刻 k,基
于过程的参数模型,预测模型通常创建和过程密切相关的实时估算模型,能够对未来某个时间
段内的过程输出序列进行预测分析,预测区间的长度称之为预测长度,表示为 N,N的数值始
终大于过程的时延 d,因此其未来输出序列不仅与先前的控制输入、输出相关,同时还与未来
的控制序列存在紧密的联系;其二,在当前时刻 k,只对过程施加当前控制增量或者当前控
制;其三,控制序列将使未输出预测序列沿着某个参考轨迹到达设定值该设定值序列可以为一
个相当长度内始终等于某个常数,也可以为一个已知的时变序列,并通过极小化某个目标函数
导出,目标函数通常选取为跟踪误差与控制的二次函数形式;其四,位移所有序列,准备下一
次采样处理,在进行下一次采样处理时,需要对控制序列进行重新计算。
2 仿真计算
2.1 GPC 算法。在 GPC 算法中,用受控自回归活动平均模型(CARIMA)描述受随机干扰
的被控对象,在 CARIMA 模型基础上,能够获得系统的多步输出预测值的矢量计算公式:
Y=f+GΔU(公式 1),公式中,ΔU 表示控制增量序列;Y表示预测输出序列;G和f是由
Diophatine 方程计算获得。当获得了被控对象多步预测输出后,取含有系统输出控制增量加权
项和对期望值误差的二次型目标函数的最小值,并利用梯度寻优法获得使性能指标极小化的最
优解,公式表示为:ΔU=GTG+λI)-1GT(Yr-f)(公式 2),公式中 λ表示控制加权系数;Yr
=yr(t+1),yr(t+2 …), ,yr(t+n))T(n表示预测长度)。GPC 算法是一种典型的广义
预测自适应控制算法,在应用的过程中,控制计算速度为关键,控制器在具体控制过程中,只
有当前控制量作用在对象上,而未来时刻的控制量仅仅对当前的性能指标产生一定程度的影
响,所以假设当前与未来的控制序列应该满足一下关系:u(k)=u(k+1)=…=u(k+m-1)
(公式 3),公式中 m表示控制长度;u(k)=u(k-1)+Δu(k)(公式 4),公式中 g表示 G
的第1列,通过变换后系统的预测输出长度不发生改变,仅仅是缩短了控制长度,显著的提高
了计算速度。
2.2 参数调整。在设计预测控制器的过程中,参数的调整占据非常重要的地位,主要是因
为其直接关系到控制器的鲁棒性、稳定性以及最终的控制效果。但是,不能够直接获得参数取
值对控制性能的最终影响,只能通过仿真与试凑对影响效果进行初步确定,但是这给初学者或
者缺乏经验的设计者带来了很大的难度,通过将 λ假设为一个可调整的参数,λ的调整方法表
示为:|Δu(k-1)|>Δumax(公式 5),其中 λmax=λ,λmax 为设定好的最大参数值;Δumax 表
示系统能够承受的最大控制增量,当控制增量增大时,采用公式 4能够降低对系统的冲击作
用,进而保证控制器的鲁棒性、稳定性以及最终控制效果。
2.3 实例仿真计算。实例仿真实验中电力系统稳定器的 GPC 控制器的结构:主要功能模块
包括:AVR、检测信号、励磁参考电压、观测器块、参数整定模块、phi 产生单元块、参数自
适应块、递推最小二乘估计块、GPC 控制器块、电力系统块。按照上述控制算法,其预测长度
n=5,控制步长为 0.1s,给定机端电压发生阶跃变化,仿真时间为 10s,持续时间为 0.2s,电力
系统的特征根为-26504、0.0788±j6.6329、-48.6272,系统由于受到一对正实部的特征根,影响
系统的稳定性,在扰动下的不稳定运行的电力系统特征根为-0.6154、-
28298、0.8787±j6.4879、-23.3670、50.0528,阻尼比表现为0.1342 振荡模态,因为阻尼比相对
较小,当遇到扰动时,系统恢复至稳定状态需要的时间相对较长,通过采用 GPC 算法,系统

摘要:
展开>>
收起<<
基于广义预测自适应控制的电力系统稳定器 电力系统稳定器是电力系统中重要的抑制低频振荡的设备,需要通过复杂的在线整定工作,才能够保证将低频振荡抑制在一定范围内,但是电力系统稳定器在进行在线整定工作时存在一定的风险,不能始终保证各个频率段的抑制效果满足相关的设计要求。基于此,人工智能控制、非线性控制、自适应控制等控制理论相继被应用在电力系统稳定器设计中,文章研究了一种基于广义预测自适应控制原理的的电力系统稳定器,该电力系统稳定器能够自动调整控制器输出,能够达到最佳的阻尼效果。 1 广义预测自适应控制的特征 “”广义预测自适应控制的特征主要包括以下几个方面:其一,每一个当前采样时刻k,基于过程...
相关推荐
-
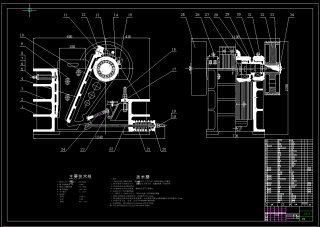
PE250×400复摆颚式破碎机的设计(摆锤式破碎机SW三维设计+说明书+AD)
 2022-10-13 271
2022-10-13 271 -
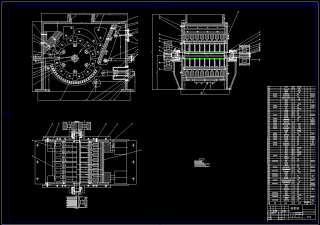
锤式破碎结构设计(锤头+锤片+CAD+说明书)
 2022-10-13 239
2022-10-13 239 -
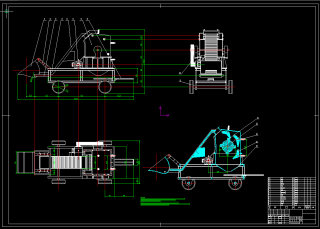
创新噬石建筑垃圾破碎机设计及有限元分析(SW三维+说明书+CAD)
 2022-10-21 266
2022-10-21 266 -
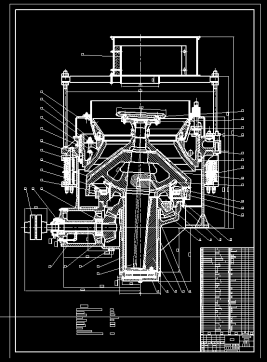
2100标准型圆锥破碎机设计(说明书+全套CAD)
 2022-10-25 237
2022-10-25 237 -
双齿辊破碎机设计(开题报告+全套CAD)
 2022-10-26 266
2022-10-26 266 -
立轴式破碎机的设计(机械毕业设计+说明书+全套CAD)
 2022-11-30 219
2022-11-30 219 -
机械毕业设计锤式破碎机
 2023-06-28 155
2023-06-28 155 -
复摆颚式破碎机-机械毕业设计资料-破碎机
 2023-10-12 231
2023-10-12 231 -
秸秆粉碎装置结构设计-机械毕业设计资料
 2024-06-19 200
2024-06-19 200 -
饲料粉碎机结构设计-机械毕业设计资料-包含SW设计+CAD图纸
 2025-11-11 185
2025-11-11 185
作者:闻远设计
分类:其它行业资料
价格:5光币
属性:2 页
大小:13.32KB
格式:DOCX
时间:2025-03-22










