
智能泡茶机器人设计与分析-智能泡茶机器人设计与分析-

智能泡茶机器人机械结构的设计和仿真
摘 要:
本文主要是智能泡茶机器人的结构设计与优化,详细设计一款智能泡茶机器人,
利用已有的相关资料,泡茶机器人是一种智能设备,旨在为用户提供便捷的泡茶体验。
这种机器人通常配备了智能控制系统和各种传感器,能够根据用户的偏好和茶叶的种
类,精确控制水温、浸泡时间和泡茶过程。泡茶机器人的出现为茶叶爱好者带来了更
加便捷和智能化的泡茶体验,也提升了茶叶泡制的精度和稳定性。
关键词:智能泡茶机器人;动力分析;结构优化
Design and Simulation of mechanical structure of large leaching
tank
Abstract:
This article mainly focuses on the structural design and optimization of an intelligent tea
making robot. A detailed design of an intelligent tea making robot is presented. Based on
existing relevant information, the tea making robot is an intelligent device aimed at providing
users with a convenient tea making experience. This type of robot is usually equipped with
intelligent control systems and various sensors, which can accurately control the water
temperature, soaking time, and tea brewing process based on user preferences and the type of
tea. The emergence of tea making robots has brought tea enthusiasts a more convenient and
intelligent tea making experience, as well as improved the accuracy and stability of tea
brewing. Taking these factors into consideration, the optimized intelligent tea making robot
can achieve more effective oil fume removal, convenient cleaning and maintenance, and
better user experience. The entire system has a simple institutional design, exquisite structure,
stable performance, and achieves multifunctionality.
Keywords: Intelligent tea brewing robot; Dynamic analysis; Structural optimization
目 录
1 绪论....................................................................................................................................1
1.1 课题背景.................................................................................................................1
1.2 国内外研究现状......................................................................................................1
1.2.1 国内研究现状...............................................................................................1
1.3 研究主要内容..........................................................................................................4
1.4 本章小结.................................................................................................................4
2智能泡茶机器人的整体方案设计.....................................................................................5
2.1 设计方案.................................................................................................................5
2.2 智能泡茶机器人机械结构......................................................................................5
2.3 结构布局.................................................................................................................5
2.4 机器人关节手臂......................................................................................................6
2.5 底座部分.................................................................................................................7
2.6 关节夹爪部分..........................................................................................................8
2.7 综合设备零件设计原则..........................................................................................9
2.8 本章小结...............................................................................................................10
3 智能泡茶机器人主要结构设计.......................................................................................11
3.1 底座旋转齿轮类型................................................................................................11
3.2 按齿面接触疲劳强度设计....................................................................................11
3.3 确定传动尺寸........................................................................................................13
3.4 校核齿根弯曲疲劳强度........................................................................................13
3.5 夹持座销轴分析....................................................................................................14
3.6 曲柄连杆的计算....................................................................................................16
3.7 支臂受力分析........................................................................................................17
3.7 电机的选择.........................................................................................................18
3.6 本章小结...............................................................................................................20
4 运用三维软件建模及经济性论述...................................................................................20
4.1 整体设计建模示意图..........................................................................................20
4.2 装配.....................................................................................................................21
4.3 其他零部件绘制设计..........................................................................................21
4.4 经济性论述.........................................................................................................24
5 结论与展望......................................................................................................................25
5.1 结论.....................................................................................................................25
5.2 展望.....................................................................................................................25
参考文献.............................................................................................................................27
致 谢.................................................................................................................................28

摘要:
展开>>
收起<<
智能泡茶机器人机械结构的设计和仿真摘要:本文主要是智能泡茶机器人的结构设计与优化,详细设计一款智能泡茶机器人,利用已有的相关资料,泡茶机器人是一种智能设备,旨在为用户提供便捷的泡茶体验。这种机器人通常配备了智能控制系统和各种传感器,能够根据用户的偏好和茶叶的种类,精确控制水温、浸泡时间和泡茶过程。泡茶机器人的出现为茶叶爱好者带来了更加便捷和智能化的泡茶体验,也提升了茶叶泡制的精度和稳定性。关键词:智能泡茶机器人;动力分析;结构优化DesignandSimulationofmechanicalstructureoflargeleachingtankAbstract:Thisarticlemain...
相关推荐
-
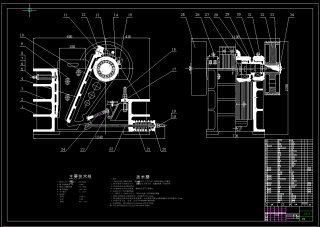
PE250×400复摆颚式破碎机的设计(摆锤式破碎机SW三维设计+说明书+AD)
 2022-10-13 271
2022-10-13 271 -
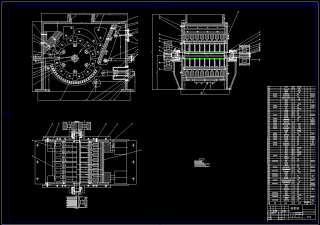
锤式破碎结构设计(锤头+锤片+CAD+说明书)
 2022-10-13 239
2022-10-13 239 -
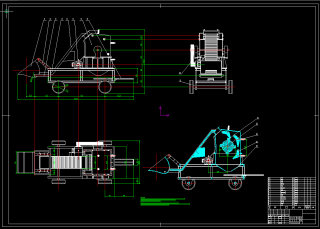
创新噬石建筑垃圾破碎机设计及有限元分析(SW三维+说明书+CAD)
 2022-10-21 266
2022-10-21 266 -
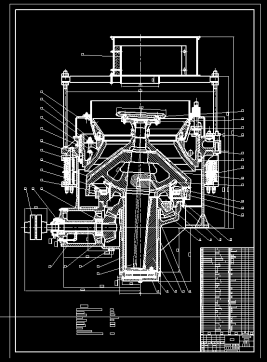
2100标准型圆锥破碎机设计(说明书+全套CAD)
 2022-10-25 237
2022-10-25 237 -
双齿辊破碎机设计(开题报告+全套CAD)
 2022-10-26 266
2022-10-26 266 -
立轴式破碎机的设计(机械毕业设计+说明书+全套CAD)
 2022-11-30 219
2022-11-30 219 -
机械毕业设计锤式破碎机
 2023-06-28 155
2023-06-28 155 -
复摆颚式破碎机-机械毕业设计资料-破碎机
 2023-10-12 231
2023-10-12 231 -
秸秆粉碎装置结构设计-机械毕业设计资料
 2024-06-19 200
2024-06-19 200 -
饲料粉碎机结构设计-机械毕业设计资料-包含SW设计+CAD图纸
 2025-11-11 185
2025-11-11 185
作者:闻远设计
分类:非标机械电气自动化
价格:50光币
属性:30 页
大小:1.11MB
格式:DOCX
时间:2024-08-27










