
换钻机器人结构设计--机械毕业设计资料

IV
V
一、 绪论...................................................................................................................................1
1.1 本文研究的目的及意义..................................................1
1.2 国内外研究现状........................................................2
1.3 国内外机械臂研究现状..................................................4
1.4 本章小结...............................................................7
二、换钻机器人结构设计.........................................................................................................9
2.1 机械臂的设计要求.......................................................9
2.2 材料选择...............................................................9
2.3 机械臂关节的选型......................................................11
2.4 零部件的确定..........................................................13
2.4.1 大臂的设计与分析....................................................14
2.4.2 小臂的设计与分析....................................................14
2.4.3 夹爪的设计与分析....................................................14
2.5 机械臂总体结构的设计..................................................15
2.6 机械臂参数............................................................16
2.7 本章小结..............................................................17
三、传动机构选型...................................................................................................................17
3.1 线绳传动:............................................................17
3.2 涡轮蜗杆传动:........................................................18
3.3 谐波减速器............................................................19
四、电机和减速器的选型.......................................................................................................20
4.1 驱动方式的选择........................................................20
4.2 计算分析..............................................................21
4.3 本章小结..............................................................23
五、其他部件的选型...............................................................................................................24
5.1 机械臂制动器的选择....................................................24
5.2 机械臂轴承的选择......................................................25
5.3 本章小结..............................................................26
VI
换钻机器人结构设计
摘 要
换钻机器人是一种用于石油钻井作业的特种机器人,用于在地下井口进行钻头更
换操作。传统的钻井作业中,钻头更换需要人工操作,工作环境恶劣且危险,容易造
成人身伤害和钻井作业效率低下的问题。因此,设计一种能够自动完成钻头更换操作
的换钻机器人,具有重要的现实意义和应用前景,对于提高钻井作业的安全性、效率
和经济效益具有重要影响。
针对以上问题,本文设计了一种换钻机器人,根据使用工况和工作空间要求,利
用Solideworks 对换钻机器人整体结构进行三维建模,使用 AUTO CAD 对关键结构件
绘制二维图纸。
关键词:机器人;三维建模;仿真分析;运动学模型;工作空间

摘要:
展开>>
收起<<
IVV一、绪论...................................................................................................................................11.1本文研究的目的及意义..................................................11.2国内外研究现状........................................................21.3国内外机械臂研究现状....................
相关推荐
-
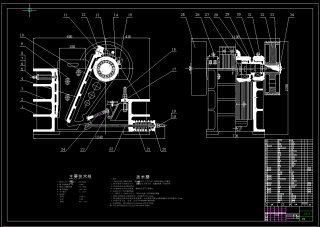
PE250×400复摆颚式破碎机的设计(摆锤式破碎机SW三维设计+说明书+AD)
 2022-10-13 271
2022-10-13 271 -
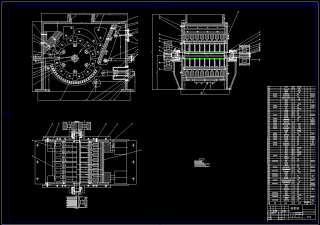
锤式破碎结构设计(锤头+锤片+CAD+说明书)
 2022-10-13 239
2022-10-13 239 -
创新噬石建筑垃圾破碎机设计及有限元分析(SW三维+说明书+CAD)
 2022-10-21 266
2022-10-21 266 -
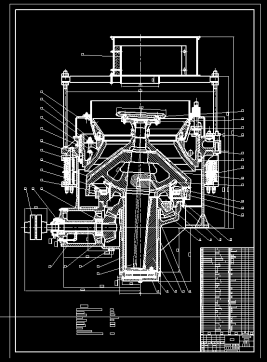
2100标准型圆锥破碎机设计(说明书+全套CAD)
 2022-10-25 237
2022-10-25 237 -
双齿辊破碎机设计(开题报告+全套CAD)
 2022-10-26 266
2022-10-26 266 -
立轴式破碎机的设计(机械毕业设计+说明书+全套CAD)
 2022-11-30 219
2022-11-30 219 -
机械毕业设计锤式破碎机
 2023-06-28 155
2023-06-28 155 -
复摆颚式破碎机-机械毕业设计资料-破碎机
 2023-10-12 231
2023-10-12 231 -
秸秆粉碎装置结构设计-机械毕业设计资料
 2024-06-19 200
2024-06-19 200 -
饲料粉碎机结构设计-机械毕业设计资料-包含SW设计+CAD图纸
 2025-11-11 185
2025-11-11 185
作者:闻远设计
分类:非标机械电气自动化
价格:100光币
属性:31 页
大小:2.45MB
格式:DOCX
时间:2024-08-16










