
四足仿生机器人任务书


2.毕业设计(论文)任务书
学院 : 专业: 班级:
主要
内容
以及
目标
(毕业设计应完成的主要内容,设计任务达到的目标)
主要内容:
(1)完成开题报告;
(2)完成四足仿生机器人结构设计;
(3)中英文摘要各 200 字,设计说明书不少于 15000 字;
(4)外文资料翻译不少于 5000 字。
目标:
(1)完成四足仿生机器人的结构设计,其中包括装配图及关键的零件图;
(2)完成机器人控制方案和控制系统设计。
成果
形式
(毕业设计完成具体工作量;成果形式;验收方式)
1. 机械结构装配图;
2. 关键零部件零件图;
3. 调研、开题报告、英文翻译(5000 字);
4. 毕业设计论文:1.5~2 万字;(其中包括中文摘要 400 字,英文摘要 250~300 单
词)
基本
要求
(
对完成设计任务方面的具体要求:对理工专业应提出设计技术参数、数据及来源、调试所
用仪器设备等)
(1)完成四足仿生机器人的方案设计; 设计具有质量小运动灵活的四足仿生机器人,
尺寸规模要求小于 140cm*75 cm *130 cm,质量小于 20kg。完成平衡、全方位行走的功
能。
(2)完成四足仿生机器人的机械结构设计,并完成装配图和关键零部件图,图纸量需达
到专业要求。
(3)分析系统关键零部件的受力,完成机械外购件选型;
(4)对控制过程所需要的传感器进行设计选型;
(5)完成四足仿生机器人的控制系统硬件设计,主要包括:控制器、电机、传感器的选
型设计,绘制机器人电气控制原理图;
(6)对重要零部件的刚度强度校核和优化
(7)完成毕业设计论文的撰写;

摘要:
展开>>
收起<<
2.毕业设计(论文)任务书学院:专业:班级:主要内容以及目标(毕业设计应完成的主要内容,设计任务达到的目标)主要内容:(1)完成开题报告;(2)完成四足仿生机器人结构设计;(3)中英文摘要各200字,设计说明书不少于15000字;(4)外文资料翻译不少于5000字。目标:(1)完成四足仿生机器人的结构设计,其中包括装配图及关键的零件图;(2)完成机器人控制方案和控制系统设计。成果形式(毕业设计完成具体工作量;成果形式;验收方式)1.机械结构装配图;2.关键零部件零件图;3.调研、开题报告、英文翻译(5000字);4.毕业设计论文:1.5~2万字;(其中包括中文摘要400字,英文摘要250~30...
相关推荐
-
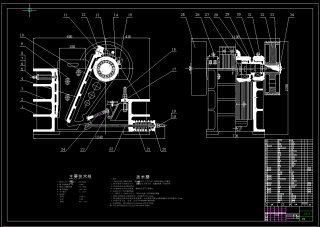
PE250×400复摆颚式破碎机的设计(摆锤式破碎机SW三维设计+说明书+AD)
 2022-10-13 271
2022-10-13 271 -
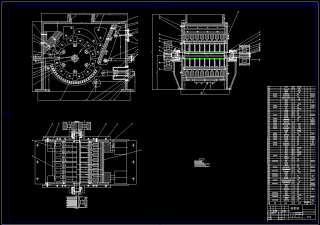
锤式破碎结构设计(锤头+锤片+CAD+说明书)
 2022-10-13 239
2022-10-13 239 -
创新噬石建筑垃圾破碎机设计及有限元分析(SW三维+说明书+CAD)
 2022-10-21 266
2022-10-21 266 -
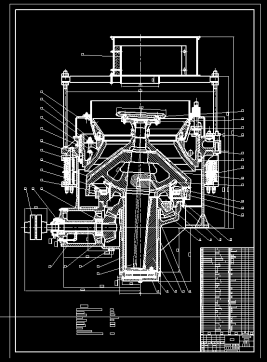
2100标准型圆锥破碎机设计(说明书+全套CAD)
 2022-10-25 237
2022-10-25 237 -
双齿辊破碎机设计(开题报告+全套CAD)
 2022-10-26 266
2022-10-26 266 -
立轴式破碎机的设计(机械毕业设计+说明书+全套CAD)
 2022-11-30 219
2022-11-30 219 -
机械毕业设计锤式破碎机
 2023-06-28 155
2023-06-28 155 -
复摆颚式破碎机-机械毕业设计资料-破碎机
 2023-10-12 231
2023-10-12 231 -
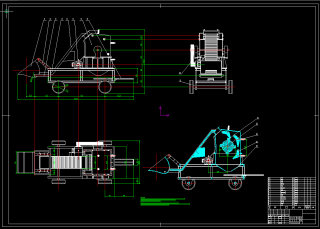
秸秆粉碎装置结构设计-机械毕业设计资料
 2024-06-19 200
2024-06-19 200 -
饲料粉碎机结构设计-机械毕业设计资料-包含SW设计+CAD图纸
 2025-11-11 185
2025-11-11 185
作者:闻远设计
分类:课程设计课件资料
价格:10光币
属性:3 页
大小:18.74KB
格式:DOCX
时间:2024-08-27










