
六自由度机器人结构设计-任务书


毕业设计(论文)任务书
题目 六自由度机器人结构设计
课题的目的和任务
为提高机器人的作业水平,设计一种模块化的六自由度机器人结构,设计内
容包括三自由度的机器人本体、三自由度的机器人抓手。通过课题训练,锻炼综合
运用所学专业知识进行机械产品设计开发的能力。使学生熟悉机构的设计流程,掌
握如何设计各种机构来完成特定的机械动作,并具备利用三维软件来完成机构建
模、仿真和出图的能力。
课题的具体内容(包括工作要求、技术要求、成果要求等)
1. 掌握文献检索的方法,通过文献阅读了解国内外研究现状和行业发展趋
势,并提文献综述报告,要求 5000 字以上,所阅读文献资料不少于 20 篇,其中英
文文献不少于 5篇。
2. 完成一篇与题目相关的外文文献翻译。
3. 利用所学专业知识,设计机器人的总体结构方案设计,要求机器人采用模
块化结构,具有三自由度度的本体以及三自由度的机械手;三自由度本体的工作
范围为 1m-2m,机械手能够抓取中小型的物体;结构简单,加工制造成本低。
4. 根据运动方案设计机构的三维模型,进行运动仿真,检测机构干涉以及机
构运动范围等。
5. 对关键零部件进行选型、校核计算,并以计算结果修正三维模型参数。
6. 利用 CAD 软件绘制工程图纸,完成关键零部件和总装图的二维出图。
7. 对设计过程进行总结,撰写毕业设计论文,要求 15000 字符以上。

主要参考文献(由指导教师选定)
[1] 濮良贵 纪名刚. 机械设计(第8版)[M]. 高等教育出版社, 2006.
[2] 马履中. 机械原理与设计[M]. 机械工业出版社, 2009.
[3] 孟庆鑫, 王晓东. 机械人技术基础[M]. 哈尔滨工业大学出版社, 2006.
[4] DSSOLIDWORKS 公司, 陈超祥, 胡其登. SolidWorks Motion 运动仿真教程[M]. 机械工业出
版社, 2016.
[5] 蔡自兴. 机器人学-第2版[M]. 清华大学出版社, 2009.
[6] 李增刚. ADAMS
入门详解与实例 [M]. 国防工业出版社, 2009.
注:1、任务书由指导教师填写;2、任务书在第七学期第 18 周前下达给学生。

摘要:
展开>>
收起<<
毕业设计(论文)任务书题目六自由度机器人结构设计课题的目的和任务为提高机器人的作业水平,设计一种模块化的六自由度机器人结构,设计内容包括三自由度的机器人本体、三自由度的机器人抓手。通过课题训练,锻炼综合运用所学专业知识进行机械产品设计开发的能力。使学生熟悉机构的设计流程,掌握如何设计各种机构来完成特定的机械动作,并具备利用三维软件来完成机构建模、仿真和出图的能力。课题的具体内容(包括工作要求、技术要求、成果要求等)1.掌握文献检索的方法,通过文献阅读了解国内外研究现状和行业发展趋势,并提文献综述报告,要求5000字以上,所阅读文献资料不少于20篇,其中英文文献不少于5篇。2.完成一篇与题目相关...
相关推荐
-
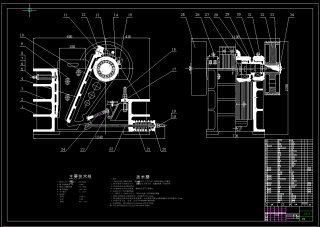
PE250×400复摆颚式破碎机的设计(摆锤式破碎机SW三维设计+说明书+AD)
 2022-10-13 271
2022-10-13 271 -
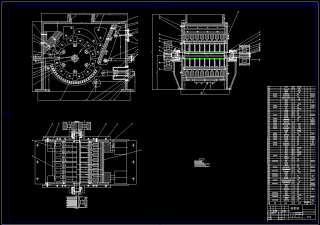
锤式破碎结构设计(锤头+锤片+CAD+说明书)
 2022-10-13 239
2022-10-13 239 -
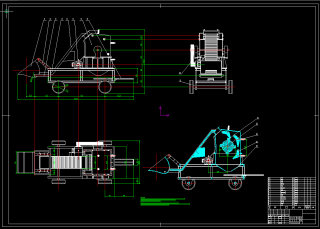
创新噬石建筑垃圾破碎机设计及有限元分析(SW三维+说明书+CAD)
 2022-10-21 266
2022-10-21 266 -
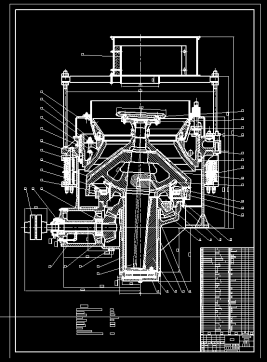
2100标准型圆锥破碎机设计(说明书+全套CAD)
 2022-10-25 237
2022-10-25 237 -
双齿辊破碎机设计(开题报告+全套CAD)
 2022-10-26 266
2022-10-26 266 -
立轴式破碎机的设计(机械毕业设计+说明书+全套CAD)
 2022-11-30 219
2022-11-30 219 -
机械毕业设计锤式破碎机
 2023-06-28 155
2023-06-28 155 -
复摆颚式破碎机-机械毕业设计资料-破碎机
 2023-10-12 231
2023-10-12 231 -
秸秆粉碎装置结构设计-机械毕业设计资料
 2024-06-19 200
2024-06-19 200 -
饲料粉碎机结构设计-机械毕业设计资料-包含SW设计+CAD图纸
 2025-11-11 185
2025-11-11 185
作者:闻远设计
分类:课程设计课件资料
价格:15光币
属性:5 页
大小:58.03KB
格式:DOC
时间:2024-02-16










